用SIFT算法检测图像特征并进行图像匹配
1、加载模块、图片,并把图片变成灰度图片。
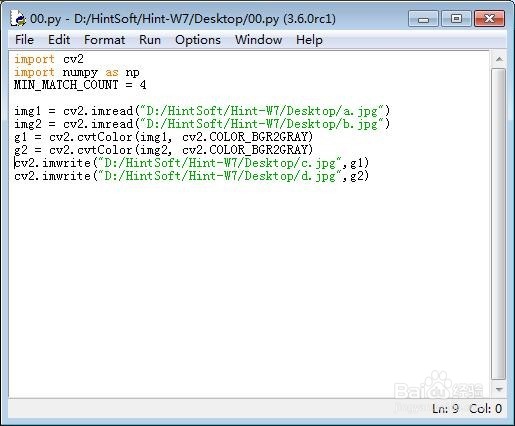
import cv2
import numpy as np
MIN_MATCH_COUNT = 4
img1 = cv2.imread("D:/……/a.jpg")
img2 = cv2.imread("D:/……/b.jpg")
g1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
g2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
2、灰度图。


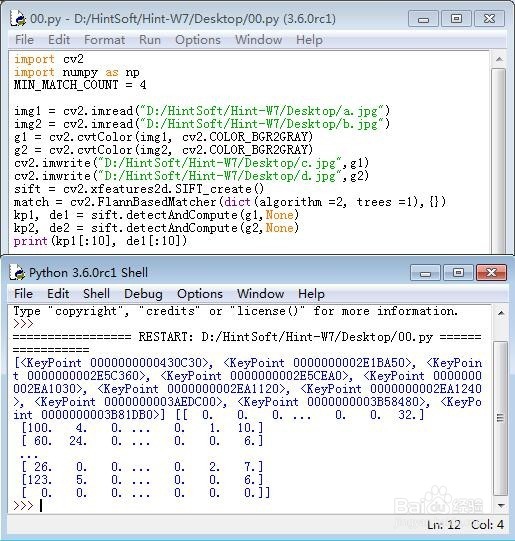
3、创建SIFT对象:
sift = cv2.xfeatures2d.SIFT_create()
创建Flann匹配:
match = cv2.FlannBasedMatcher(dict(algorithm =2, trees =1), {})
检测特征点,并描述特征点:
kp1, de1 = sift.detectAndCompute(g1,None)
kp2, de2 = sift.detectAndCompute(g2,None)
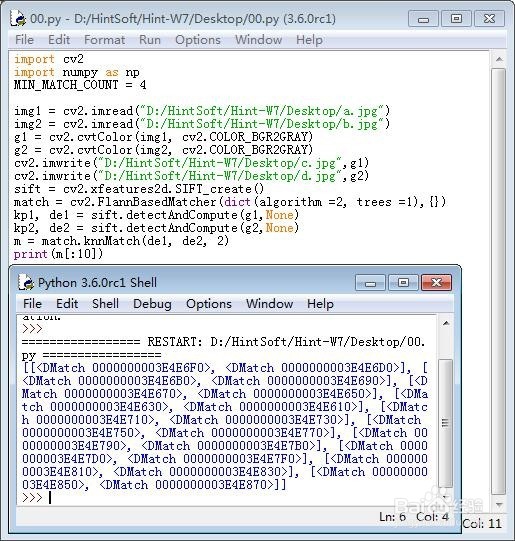
4、用knn匹配,来提取de1和de2的靠前的数据
m = match.knnMatch(de1, de2, 2)
5、重新排序:
m = sorted(m,key = lambda x:x[0].distance)
6、提取效果较好的几个可匹配特征点:
ok = [m1 for (m1, m2) in m if m1.distance < 0.7 * m2.distance]

7、根据匹配的特征点,对第1幅图片进行透视变换,使之与第一幅图的已经匹配的特征点尽量重合:
if len(ok)>MIN_MATCH_COUNT:
pts0 = np.float32([ kp1[i.queryIdx].pt for i in ok]).reshape(-1,1,2)
pts1 = np.float32([ kp2[i.trainIdx].pt for i in ok]).reshape(-1,1,2)
M, mask = cv2.findHomography(pts0,pts1, cv2.RANSAC,5.0)
h,w = img1.shape[:2]
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
cv2.polylines(img2,[np.int32(dst)],True,(0,255,0),3, cv2.LINE_AA)
else:
print( "匹配点的数目不够! - {}/{}".format(len(ok),MIN_MATCH_COUNT))

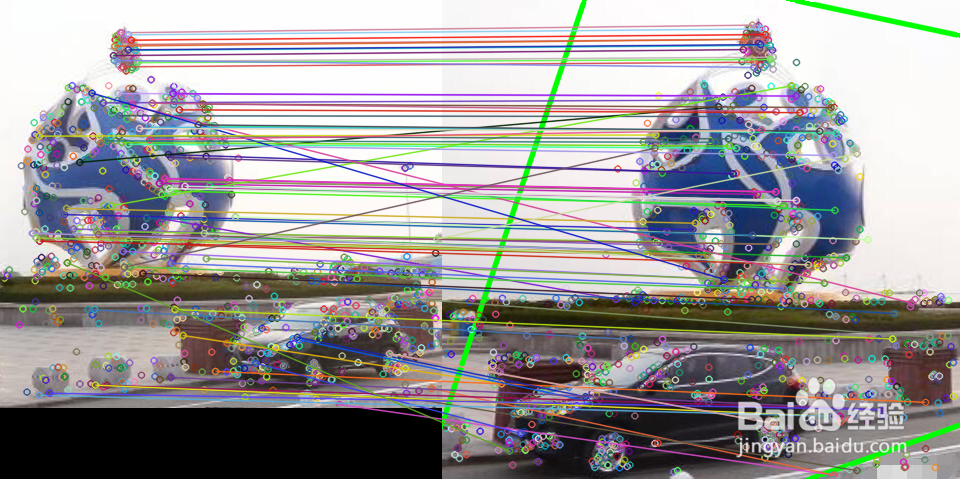
8、用线把匹配的特征点连接起来:
med = cv2.drawMatches(img1,kp1,img2,kp2,ok,None)
可以看出来,有些匹配的特征点,并不匹配。
这说明,如果发生位移,那么,匹配结果会有所出入。
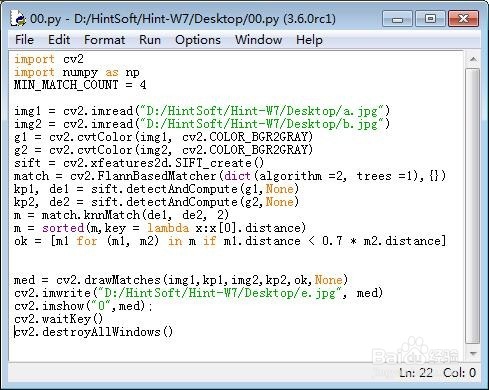
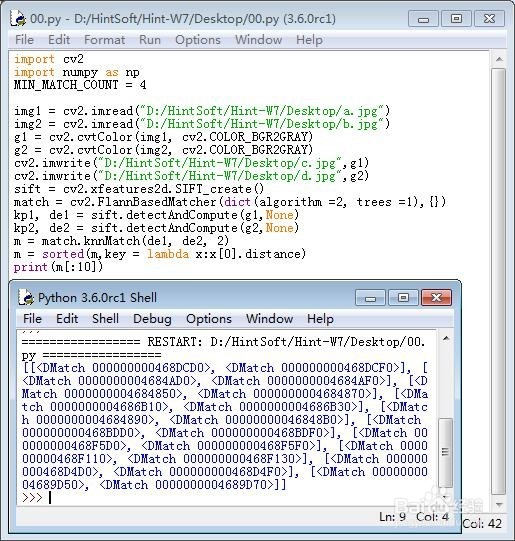
9、整体代码如下图所示。