手部绑定:胳膊自动扭曲
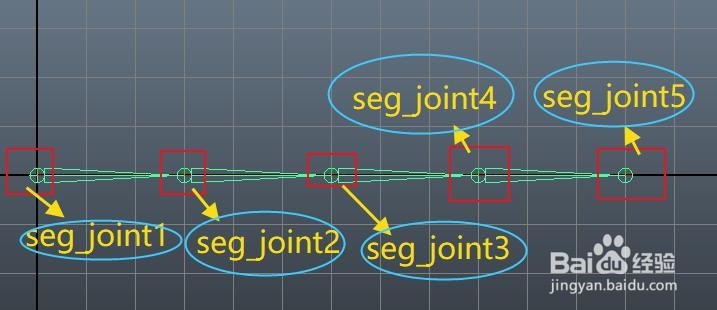
1、1:按“X”键将骨骼吸附在网格点上;
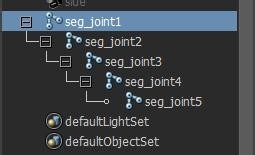
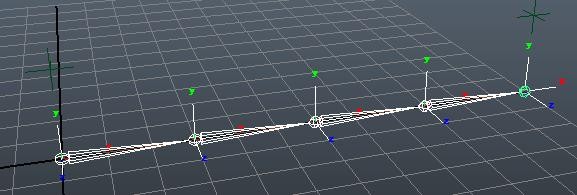
(1)创建一节骨骼,命名:添加前缀名为seg_;

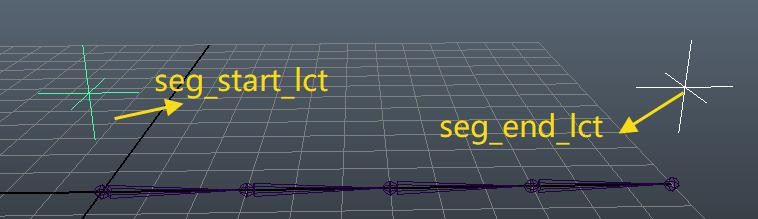
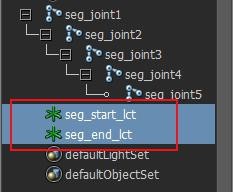
2、2:创建两个定位器,命名为seg_start_lct和seg_end_lct,分别吸附到seg_joint1和seg_joint上方;“局部比例”改为0.5;

3、3:使用“CV曲线工具”,创建一根曲线(按v键,首尾两点分别吸附在seg_joint1和seg_joint5上),命名为seg_curve;
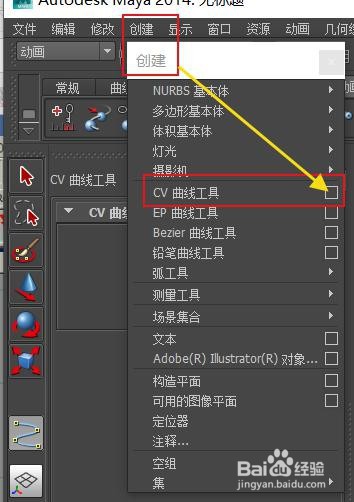



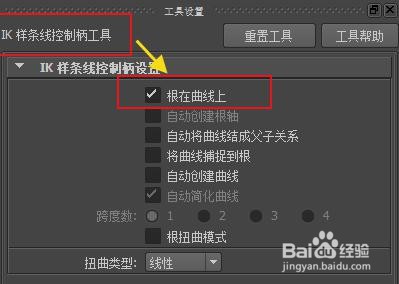
4、4:使用“IK样条线控制柄工具”;
(1)其IK样条线控制柄设置只勾选“根在曲线上”;
(2)先后点击骨骼seg_joint1和seg_joint5上,再点击曲线seg_curve;命名为seg_ikhandle;


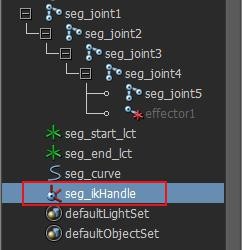
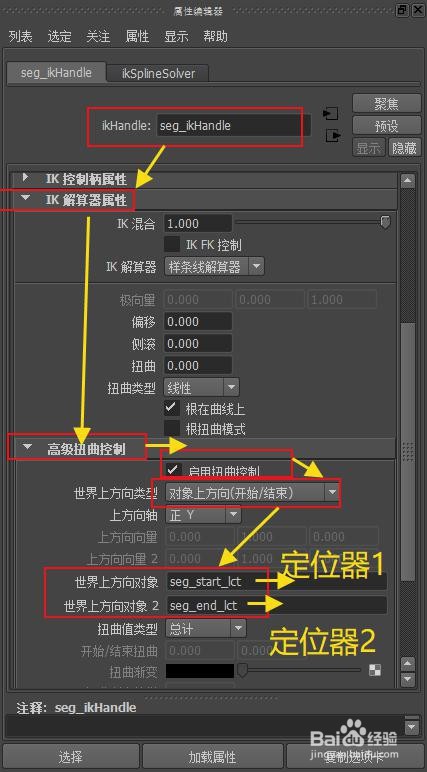
5、5:按“ctrl”+“A”键,可以打开“属性编辑器”;
(1)选IK:seg_ikhandle,打开其“属性编辑器”,在“IK解算器属性”---“高级扭曲控制”中:勾选“启用扭曲控制”,再编写IK的属性;
6、6. 选中骨骼<1>seg_joint1 <2>seg_joint2 <3>seg_joint3 <4>seg_joing4 <5>seg_joing5,打开其“局部旋转轴向” ;

7、7:选中定位器可以测试骨骼翻转;

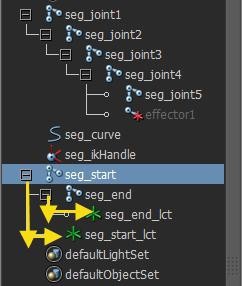
8、8:创建一节辅助骨骼,命名为seg_start和seg_end;
(1)将辅助骨骼的半径值改为1;
(2)将辅助骨骼seg_start吸附在骨骼seg_joint1;将辅助骨骼seg_end吸附在骨骼seg_joint5;
(3)将定位器seg_start_lct按“P”键给辅助骨骼seg_start当子物体;
将定位器seg_end_lct按“P”键给辅助骨骼seg_end当子物体;
(4)给辅助骨骼创建一个图层;
(5)可以选中辅助骨骼进行旋转测试;




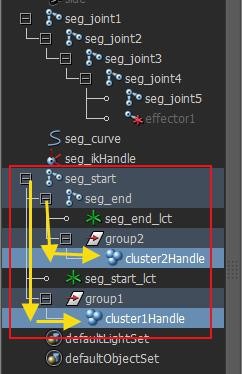
9、9. 创建“簇”;
(1)选中曲线seg_curve,鼠标右键选“控制顶点”,首尾两个控制点各建一个簇;
(2)将曲线的“簇”分别P给辅助骨骼seg_start和seg_end当子物体;
(3)可以选择辅助骨骼检测辅助骨骼能不能带动整体骨骼;


10、9. 骨骼的拉伸;
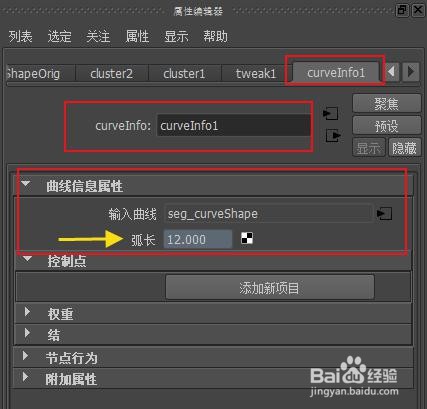
(1)选中曲线seg_curve创建长度节点,在“命令栏”输入“arclen -ch 1”,按enter键回车确认;
(2)选曲线seg_curve,按“ctrl”+“A”键,打开属性编辑器,查看曲线添加的长度节点;
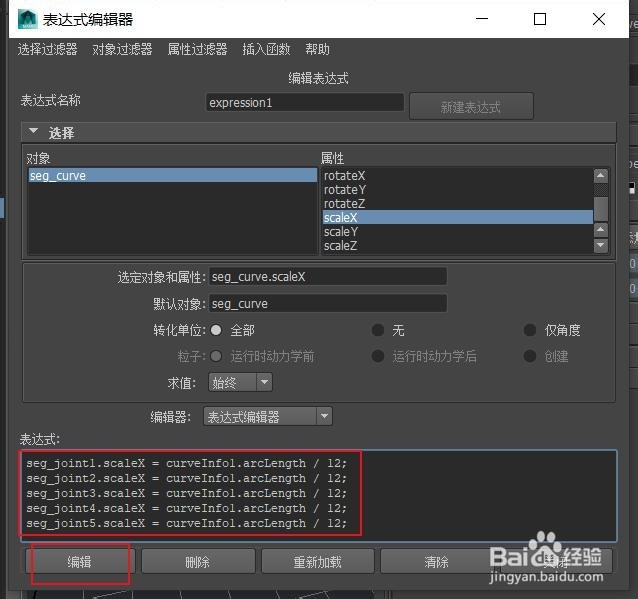
(3)打开“表达式编辑器”,编写表达式:
seg_joint1.scaleX = curveInfo1.arcLength / 12;
seg_joint2.scaleX = curveInfo1.arcLength / 12;
seg_joint3.scaleX = curveInfo1.arcLength / 12;
seg_joint4.scaleX = curveInfo1.arcLength / 12;
seg_joint5.scaleX = curveInfo1.arcLength / 12;

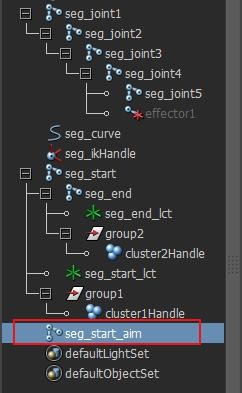
11、11:再创建一个骨骼来限制X轴,命名为“seg_start_aim”;
(1)半径0.8,吸附在根骨骼seg_joint1;
(2)将第一个定位器seg_start_lct按“P”键给它当子物体;


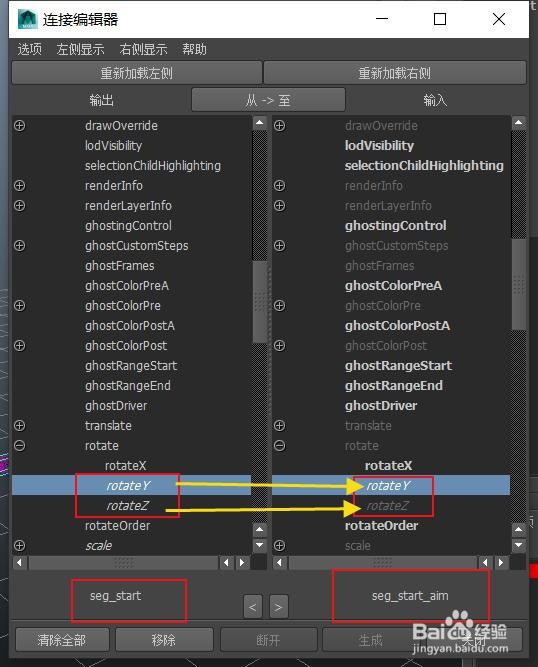
12、12:选中辅助骨骼seg_start和骨骼seg_start_aim,打开“连接编辑器”,连接它们的旋转Y轴和Z轴;

13、13:选中所有,成组,命名为“seg_grp”;

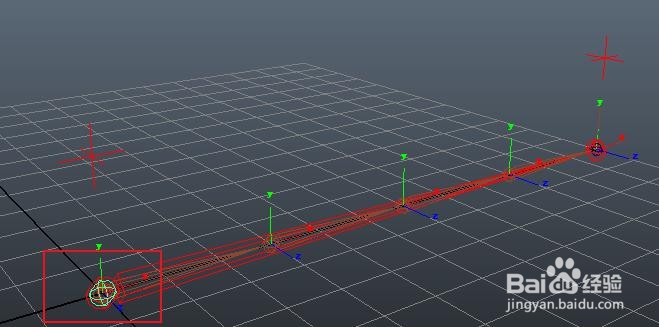
14、14:选中组seg_grp,位移;
(1)当骨骼不一起走的时候,选中曲线“seg_curve”;
(2)按“ctrl”+“A”键,打开曲线“seg_curve”的“属性编辑器”;
(3)()不勾选“继承变换”;

15、15:保存文件,(~~~.ma格式),命名为“limb_segment”;
1、16:创建一节手臂骨骼,命名为;
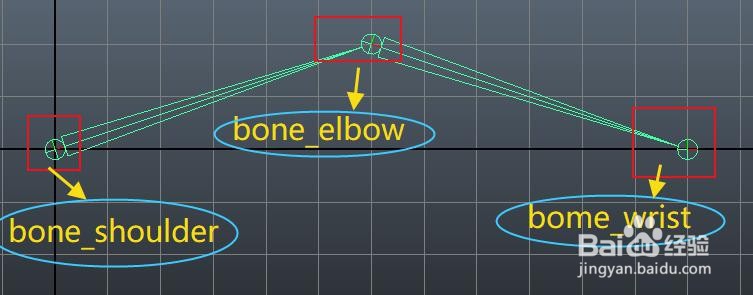
2、17:导入文件“limb_segment”;
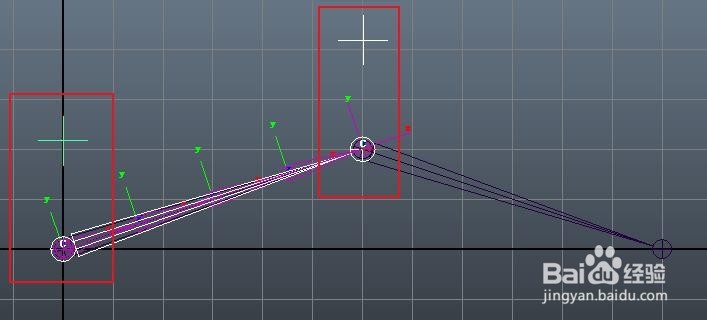
《1》首尾分别吸附在bone_shoulber 和bone_elbow;
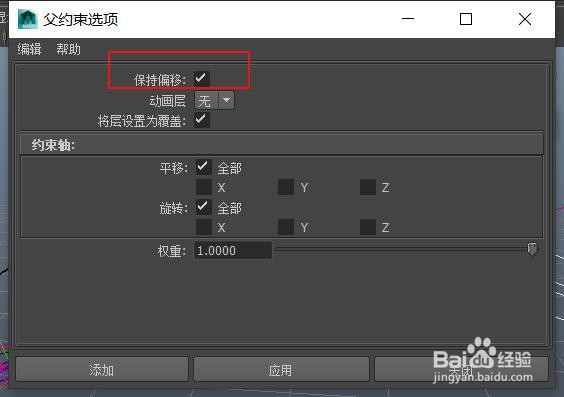
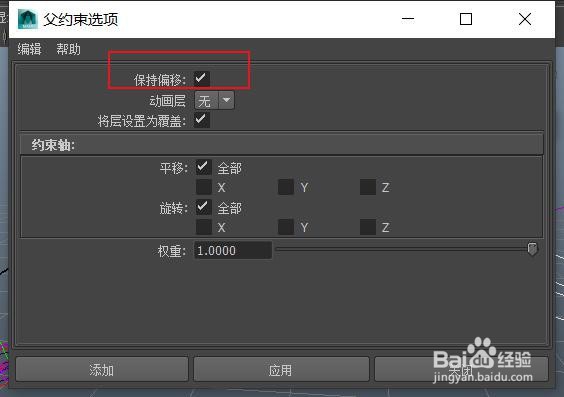
《2》“父对象”约束;
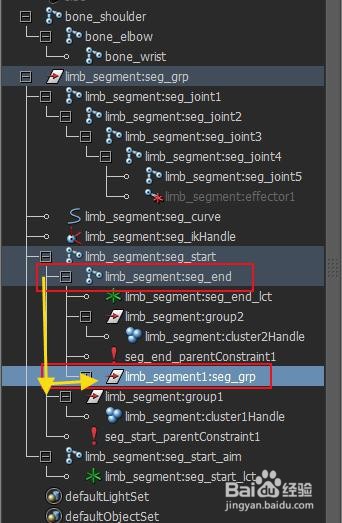
(1)选中手臂骨骼bone_elbow和导入骨骼limb_segment:seg_end;
(2)选中手臂骨骼bone_shoulber和导入骨骼limb_segment:seg_start;
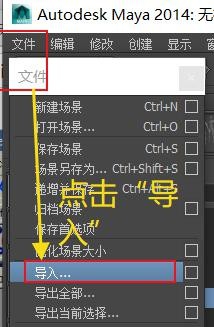
3、18:再导入文件“limb_segment”;
《1》首尾分别吸附在bone_elbow和bone_wrist;
《2》选中再导入骨骼limb_segment1:seg_grp和导入骨骼limb_segment:seg_end,按“P”键当子物体;
《3》手臂骨骼bone_wrist和再导入骨骼limb_segment1:seg_end,“父对象”约束;
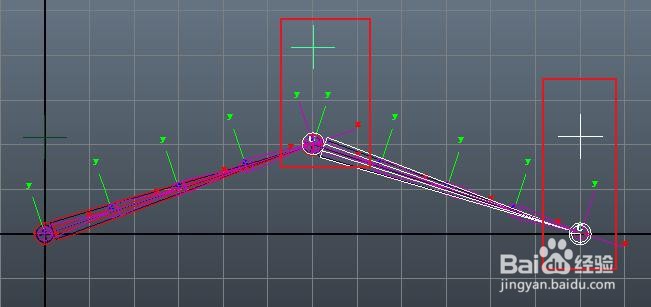
4、19:可以选手的bone骨骼旋转测试骨骼间的旋转是否呈递减状态;