在RobotArt-自定义工具
1、【导入模型】
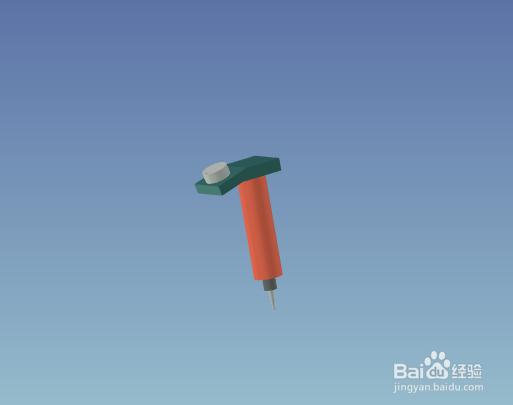
首先需要一个三维模型的工具(支持多种的格式,如Iges,Step等,然后在【机器人编程】下【场景搭建】一栏中的【输入】按钮,可将要加工的模型导入绘图区。以“涂胶枪”为例:
2、【设置FL附着点】
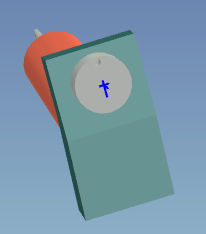
导入涂胶枪后,在绘图区选中“涂胶枪”,在【工具箱】下【操作】一栏中选择【附着点】,然后点击需要加附着点的位置,在本例中,选中图中圆,点击圆的中心点,如图所示:
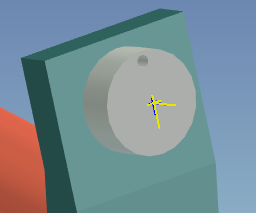
3、附着点的姿态,在上图中,最长的轴垂直于所在的平面,其余两个轴的可根据实际的安装,进行一定角度的选择。
调整附着点的姿态,首先选中附着点,激活三维球,选中的方法,需要先选中整个模型,再一次点击附着点,当附着点呈现黄色时,出于被选中状态,然后点开【工具】栏上的三维球。
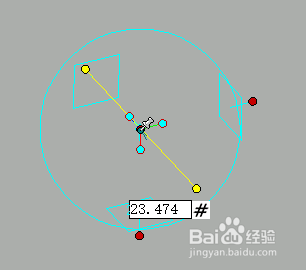
4、【编辑附着点姿态】
编辑附着点的姿态,固定长轴,然后在三维球内绕此轴旋转,则可编辑附着点两个短轴的位姿。
5、【设置附着点的名字】
选中附着点,右击,在选项中旋则设置名称,输入大写的FL,点击确定,即可完成法兰盘附着点的设置。
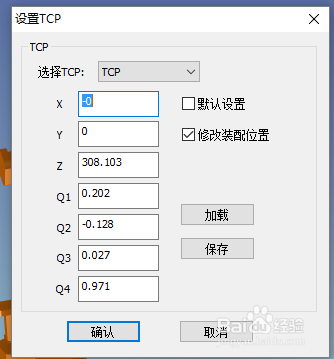
6、【TCP附设置操作】
TCP设置原理同FL的相同,设置附着点,改变附着点的姿态,改变附着点的名称(TCP)
简简单单的六步,工具的附着点已设置完毕!
附加:TCP附着点的姿态根据实际情况进行调整,这个需要进行TCP设置,在绘图区右击工具,选择TCP设置,这些数字根据实际测量的值填入想相应的框中。(这一步是后续的工作。。。下期继续了解。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:174
阅读量:161
阅读量:112
阅读量:58
阅读量:140