机器视觉与下位机通信
1、 在过程最后加入串口通信模块
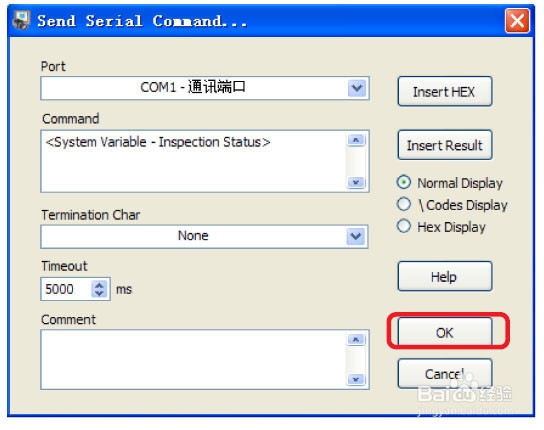
2、点击Send Command按钮,进入设置发送串口指令设置界面
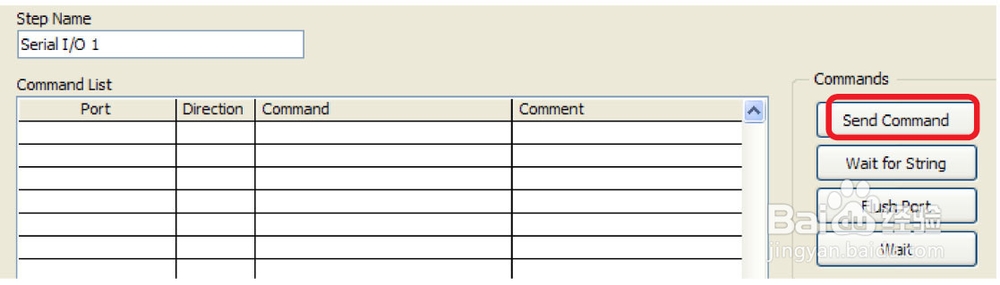
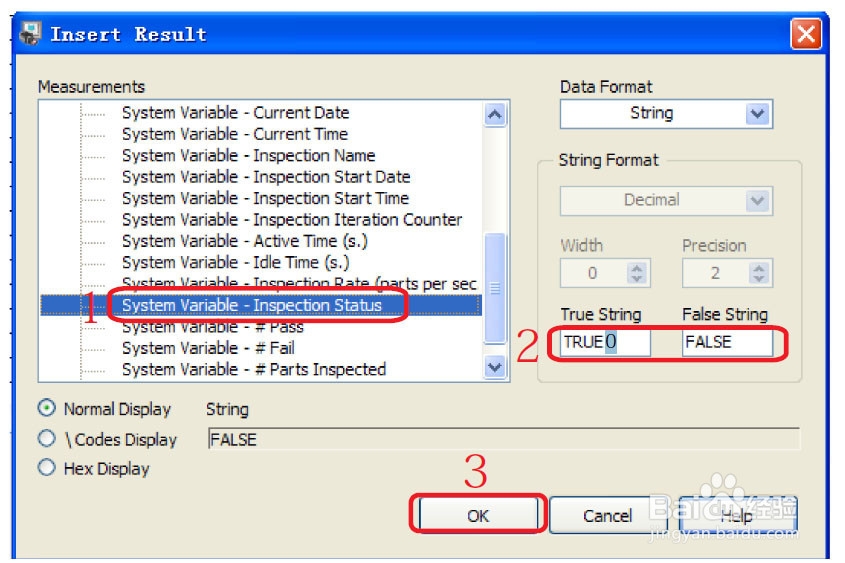
3、点击InsertResult按钮,进入插入结果设置界面
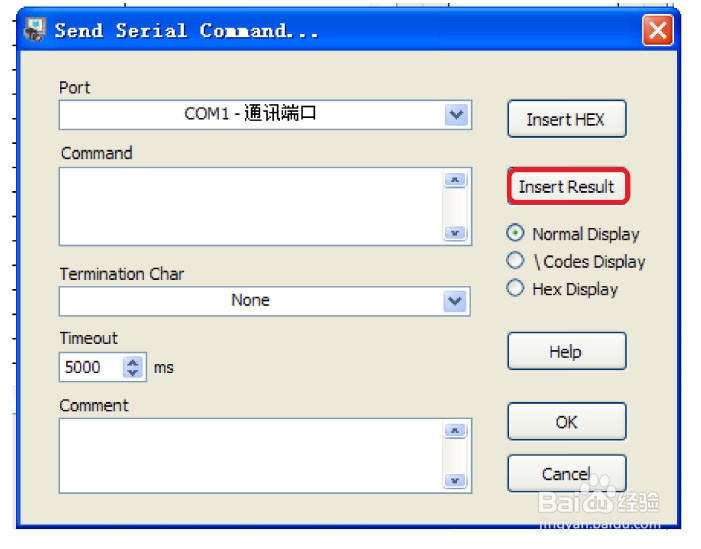
4、在Measurements中选中 System Variable-Inspection Status
将True String 设置成 TRUE0,
False String 设置成FALSE
点击OK返回
5、点击OK返回
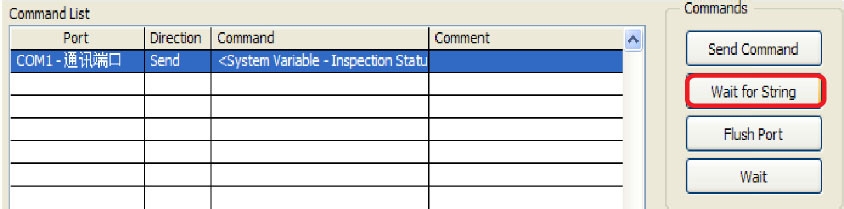
6、点击Wait for String按钮,进入设置等待串口指令设置界面
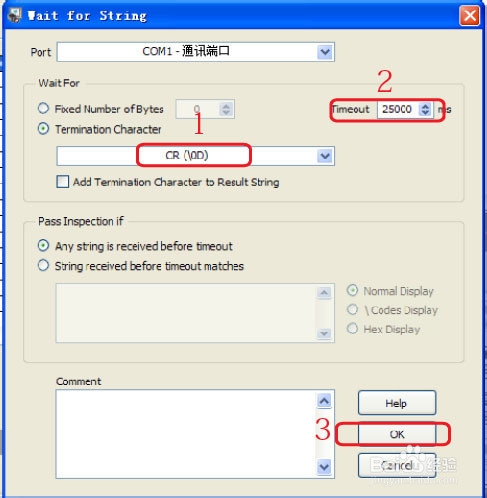
7、 在Termination Character 中选CR(\0D)作为等待触发指
调节等待时间为25秒
点击OK返回
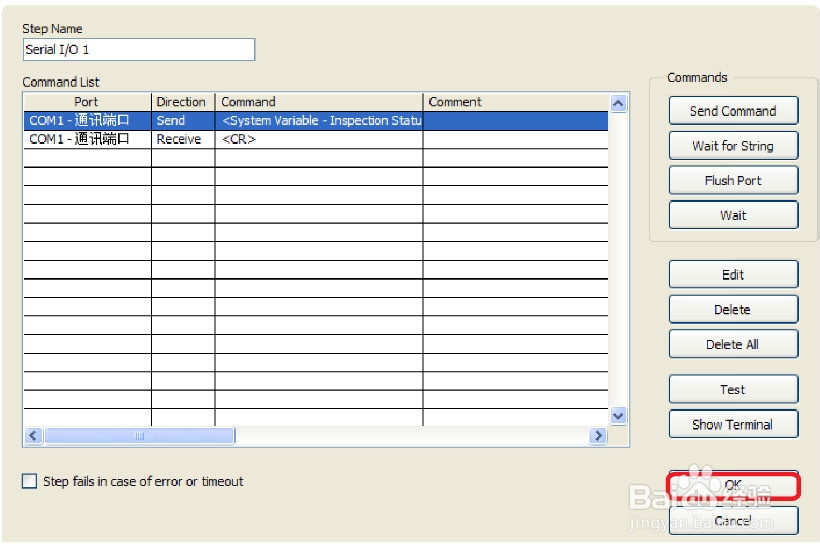
8、至些完成了串口设置 点击OK返回
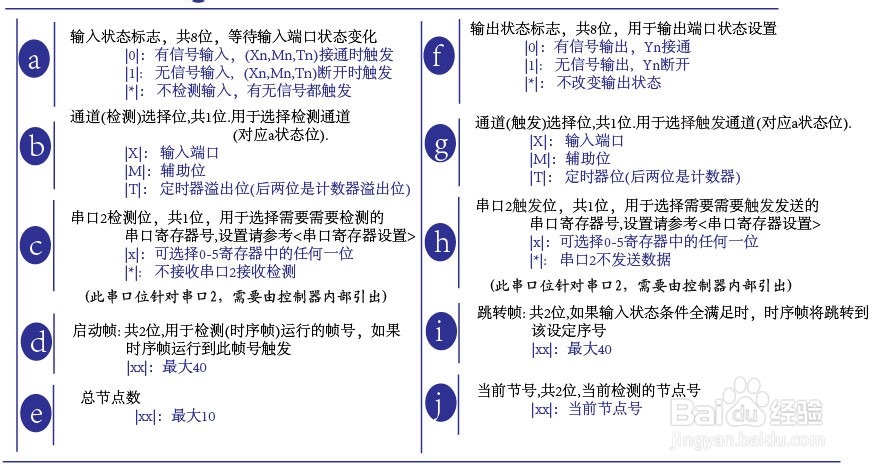
1、将控制器调到组合逻辑界面下,按下上下两键进入设置界面
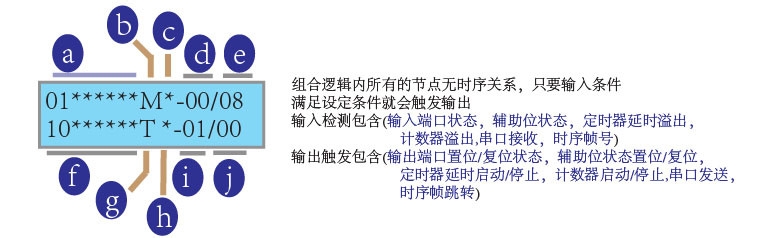
2、分析状态表
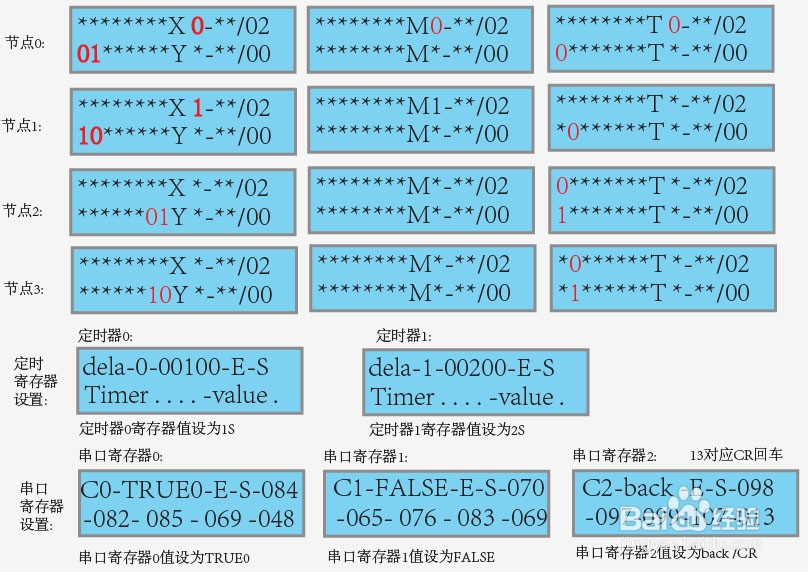
如果收到0号串口寄存器值,则触发Y0输出,Y1断开,启动定时器0
如果收到1号串口寄存器值,则触发Y1输出,Y0断开,启动定时器1
如果定时器0溢出,则触发Y6输出,Y7断开,清除定时器0标志
如果定时器1溢出,则触发Y7输出,Y6断开,清除定时器1标志

3、将状态表输入控制器,这里我们需要设置的是组合逻辑
4、至此,通过串口连接上位机与下位机,就实现控制要求了
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:96
阅读量:104
阅读量:33
阅读量:77
阅读量:160