机械臂爪的配合,实现同步运动的两种方式。
1、先装配好机械臂爪的一侧。

2、然后使用镜像特征,进行镜像零部件。

3、这样就能够实现对称的同步运动了。

1、将机械臂爪的所有零部件进行装配。
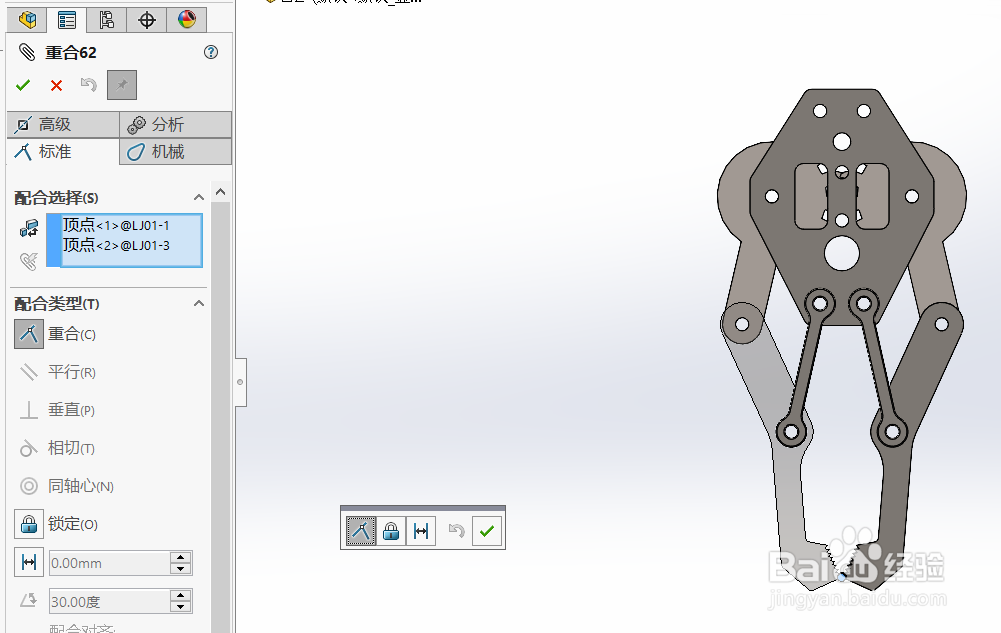
2、找准机械爪的顶点,添加重合配合,保证机械爪两端对称。
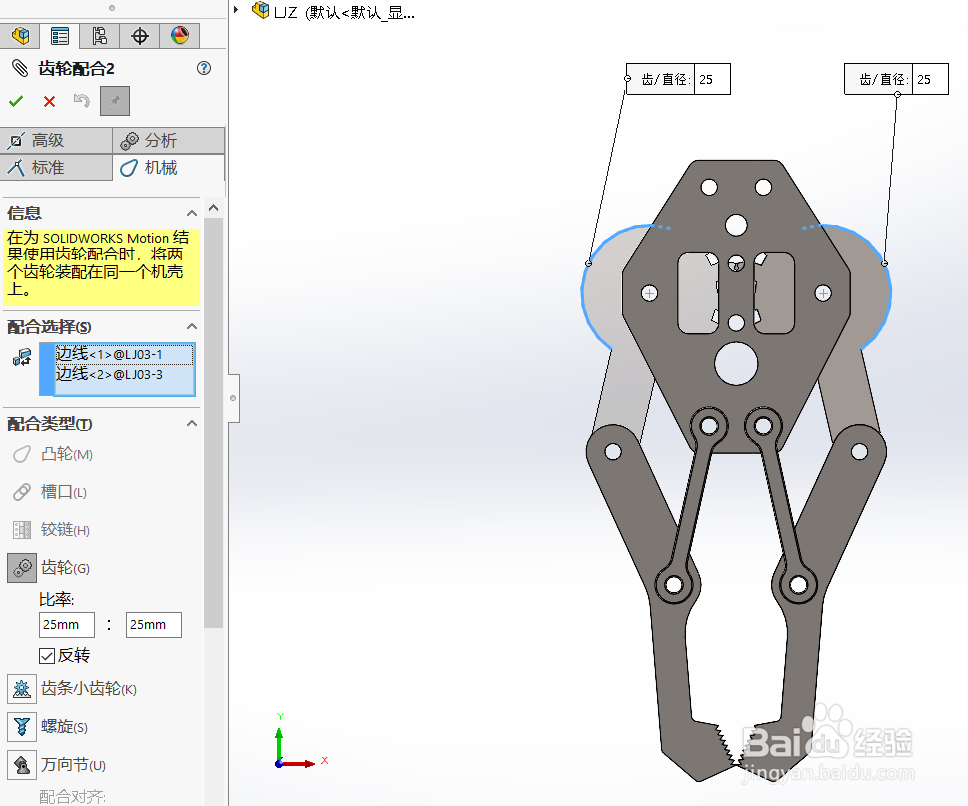
3、在驱动的圆形轮廓上添加齿轮配合,调整旋转比例并勾选反转。
4、删除或者压缩上一个重合特征。
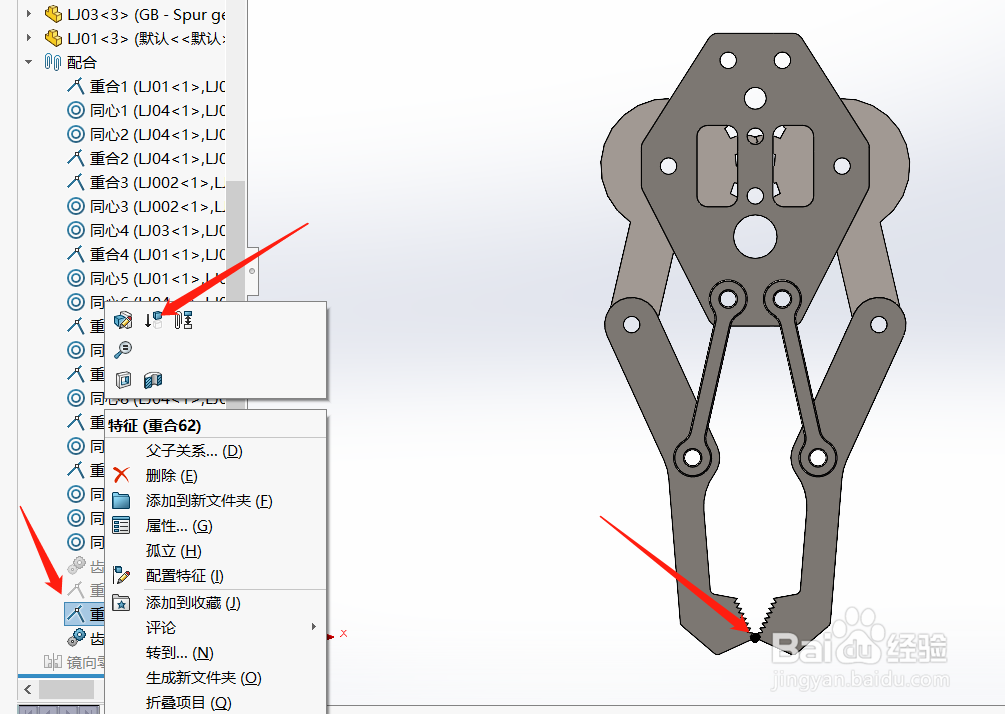
5、然后就能够实现对称同步运动了。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:25
阅读量:50
阅读量:110
阅读量:95
阅读量:61