教你用KM动平衡分析仪校正固定3个质量块平衡
1、旋转机械是机械系统的重要组成部分,在国防和国民经济众多领域中发挥着巨大作用。转子不平衡是旋转机械中的常见问题,也是诱发转子系统故障的主要原因之一。因此,开展动平衡技术研究具有重要的学术和工程应用价值。但随着电子计算机和测试等技术的迅猛发展,动平衡技术也得到了很大发展,其研究成果对推动旋转机械向高速、高效、高可靠方向发展起到了重要作用,有关转子动平衡技术的研究主要集中在动平衡测试、非对称/非平面模态转子平衡、无试重平衡、自动平衡等技术领域,动平衡校正前,首先计算好试重信息,三个质量块质量分别默认为单位 ,如下图指示 在仪器“计算器”功能里分两步计算:

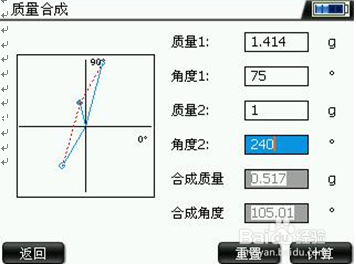
2、在转子一个校正面上进行校正平衡,校正后的剩余不平衡量,以保证转子在静态时是在许用不平衡量的规定范围内,为静平衡又称单面平衡。,设备分别添加三个质量块在 0°、120°、240°,旋转设备,测量初始振动。 停机将 0°质量块移至 30°,120°、240°两个质量块角度保持不变,将上图计算结 果:质量 0.517g,角度 105.01°输入仪器试重信息栏里面即可。如下图所示:

3、如何选择转子的平衡方式,是一个关键问题。其选择有这样一个原则:只要满足于转子平衡后用途需要的前提下,能做静平衡的,则不要做动平衡,能做动平衡的,则不要做静动平衡。原因很简单,静平衡要比动平衡容易做,省功、省力、省费用。、启动设备,按照动平衡正常步骤测量试重后的振动信息,例如仪器计算校正结果如下:

4、现代,各类机器所使用的平衡方法较多,例如单面平衡(亦称静平衡)常使用平衡架,双面平衡(亦称动平衡)使用各类动平衡试验机。、对 0.38g 和 138°进行角度分解,仪器分解方式选择:到固定质量,分解到 1、2:两栏 分别输入单位 1,点击仪器按钮“分配”进行计算。如下图所示:
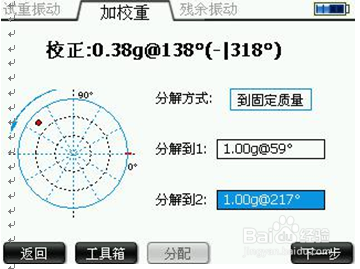
5、仪器计算结果为质量块一放置角度 59°,质量块二放置角度 217°,但实际设备是有三 个质量块存在,所以还需要继续分解一次,如下图所示首先选择“工具箱”功能,其次选择 “分解计算”,对质量块一进行再次分解计算。按照最终计算结果,三质量块分别放置角度 为:359°、119°、217°。

6、动平衡试验机虽能较好地对转子本身进行平衡,但是对于转子尺寸相差较大时,往往需要不同规格尺寸的动平衡机,而且试验时仍需将转子从机器上拆下来,这样明显是既不经济,也十分费工(如大修后的汽轮机转子)。特别是动平衡机无法消除由于装配或其它随动元件引发的系统振动。按照计算结果添加质量块完成后,启动设备测量残余振动量,如需要继续校正,可按照 上一步到固定质量分解计算运用即可。