三连杆运动仿真机构在UG中怎么建
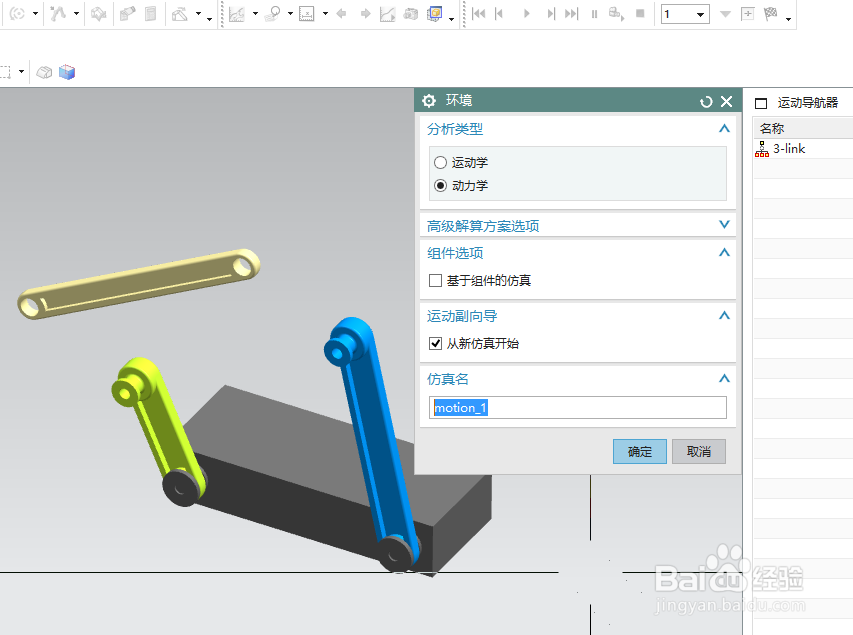
1、打开要进行机构仿真的三连杆运动图档,进入到运动仿真后,然后新建一个仿真运动;
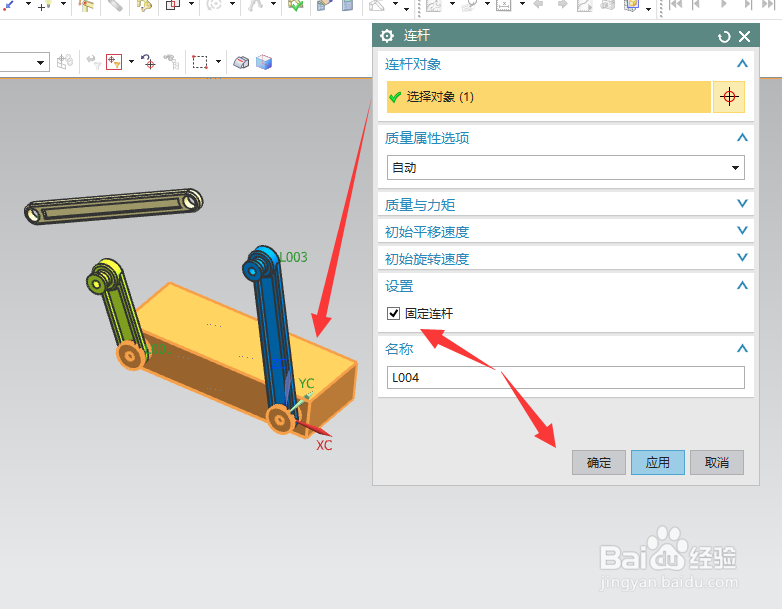
2、依次选择图上的四个零件,把其设为连杆,要把第四个连杆设为固定连杆;
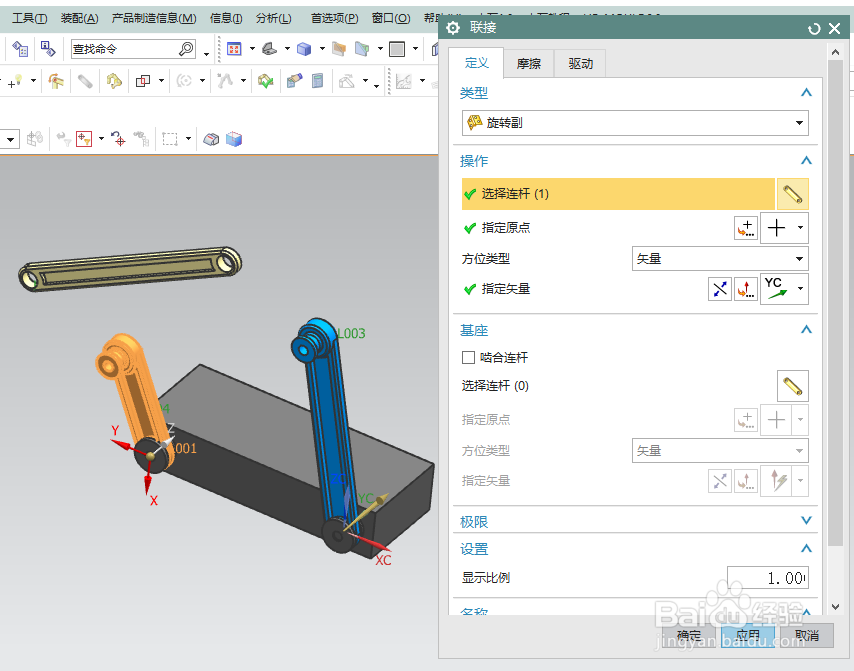
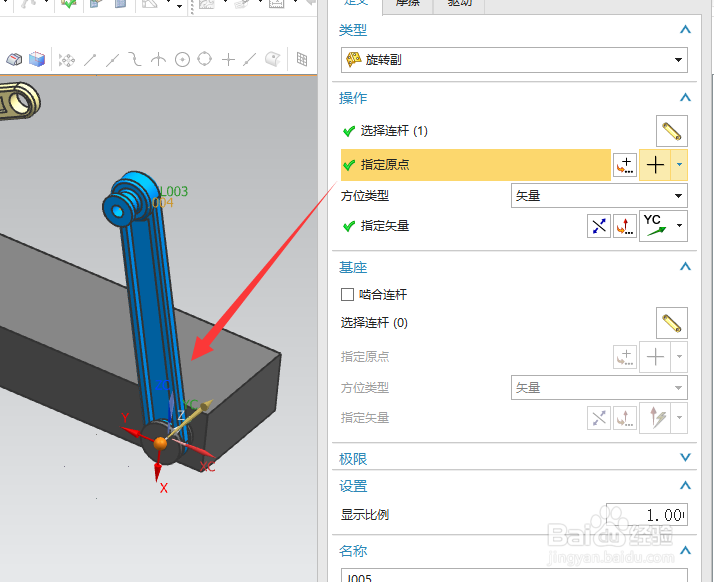
3、选中第一个连杆,其运动副类型为旋转副,在设置完后,其驱动类型设为恒定,其初始速度给60;
4、同3,选中第二个连杆,其啮合连杆与连杆1配合;
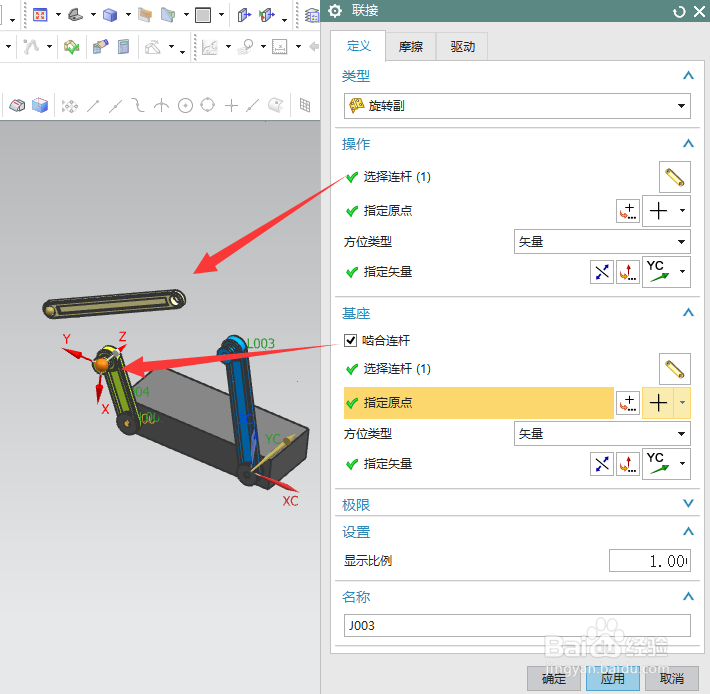
5、在添加第二个啮合连杆时,要选中连杆2,也就是说,连杆2要用2次;
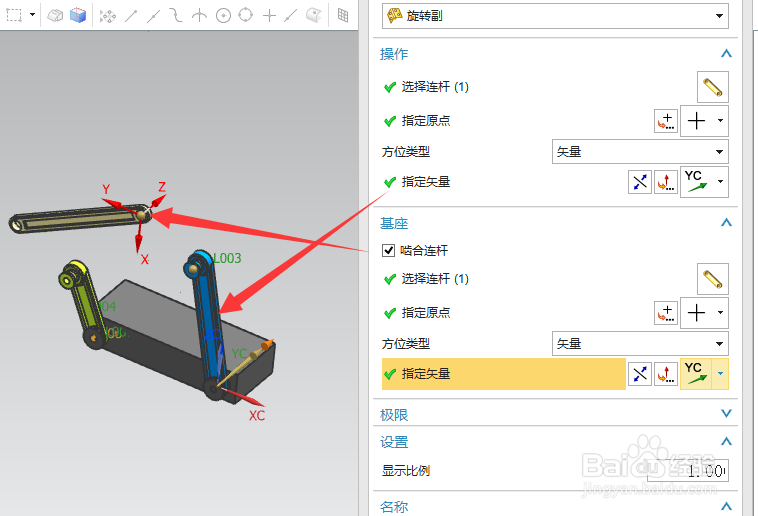
6、选中连杆2,把其作为第四个旋转副,在给其方向和旋转点后,点确定;
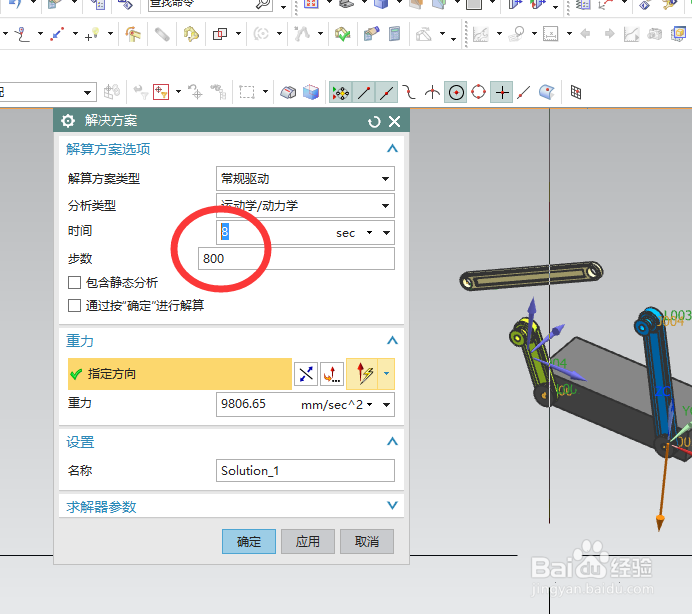
7、单击求解,在弹出的解决方案中,按下图参数设定时间及步数;
8、使用动画按键,来模拟出三连杆机构仿真在UG10.0中的运动状态;

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:64
阅读量:76
阅读量:64
阅读量:55
阅读量:193