arduino智能小车L298模块使用方法
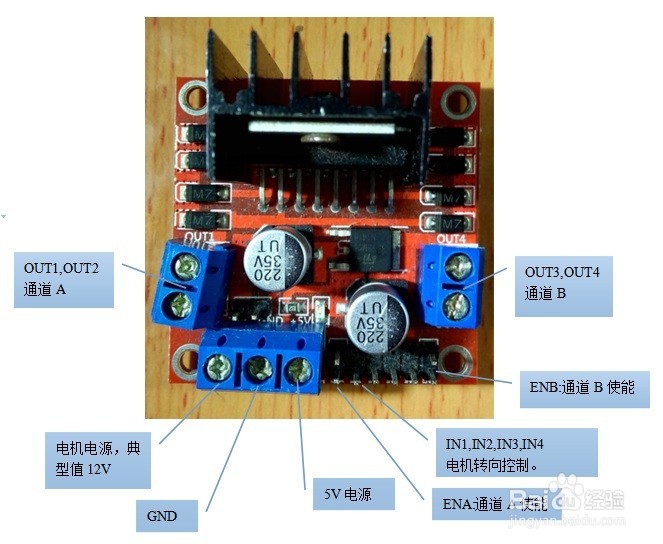
1、L298电动机驱动模块的功能引脚如图,电机电源典型值是12V,实际上按手册里说明能接2.5V到46V(使用更高电压请慎重)。将其接到arduino控制板,或者使用proteus8仿真软件来仿真arduino。需要说明的是,将arduino的PWM输出信号接到通道A使能和通道B使能,即可分别控制电机A和电机B转速。而IN1,IN2控制电机A的转向,IN3,IN4控制电机B的转向。

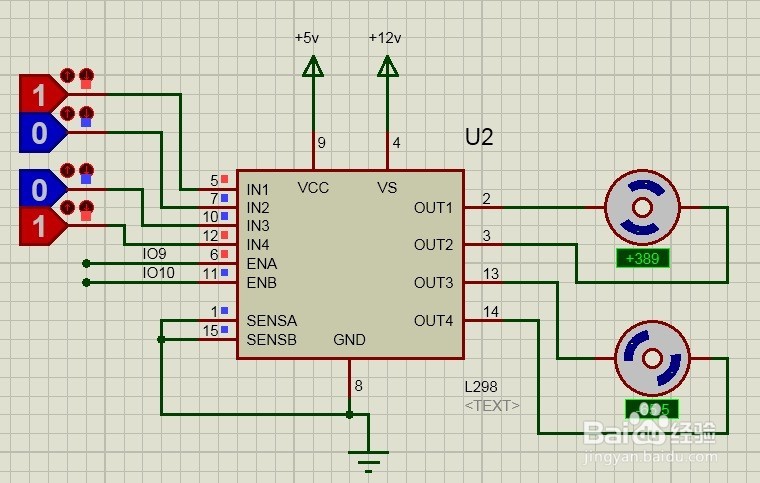
2、下面使用proteus8来仿真作演示,原理图如图。这里PWM输出使用的是9脚和10脚,arduino代码如下
void setup()
{
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
}
void loop()
{
analogWrite(9, 80);// pwm信号A,对应电机A,取值越大转速越快,下同
analogWrite(10, 180);//PWM信号B,对应电机B
delay(200);
}
由于这里使用的是仿真,因此可以在调试时很方便更改IN1-IN4的电平,但如果使用的是arduino开发板,得连接4个数字输出引脚并增加一些代码控制IN1-IN4的电平,相信对于有arduino入门基础的童鞋都不难。

3、运行仿真后,这是电机A正转、电机B反转的图示。可以从转速大小值来观察电机的转向,转速为正值表示正转,负值表示反转。
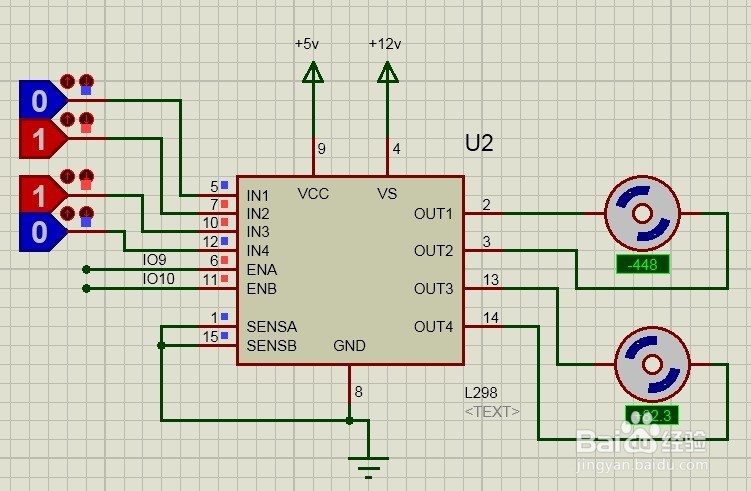
4、将IN1,IN2,IN3,IN4高低电平互相切换,可以观察到电机转向的变化。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:24
阅读量:49
阅读量:83
阅读量:169
阅读量:54