arduino蓝牙手柄使用教程
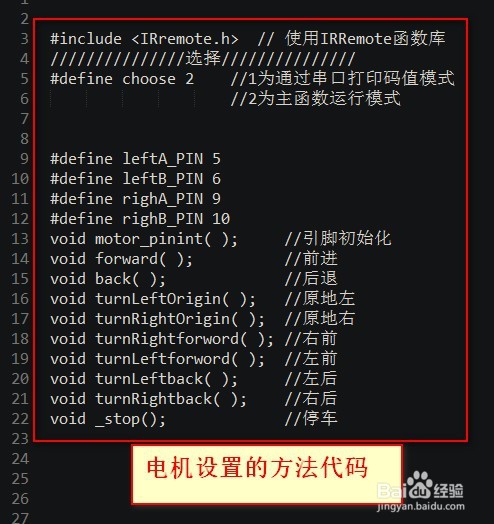
1、1.电机设置的方法代码
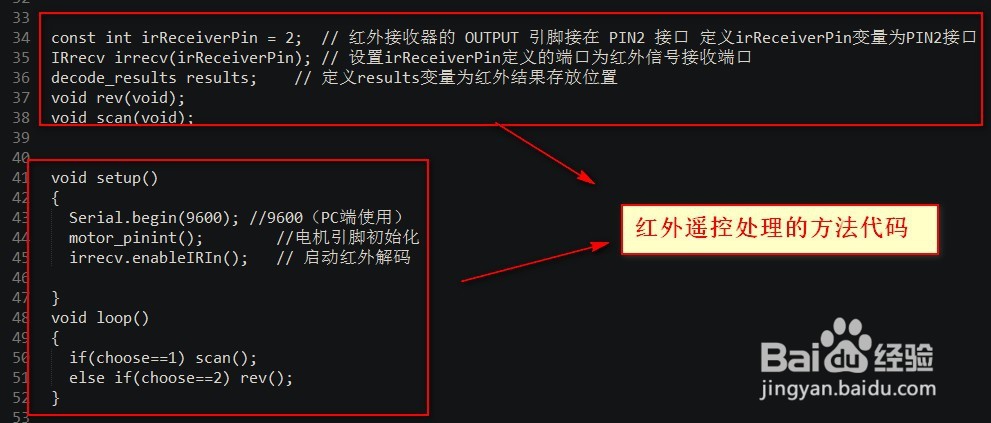
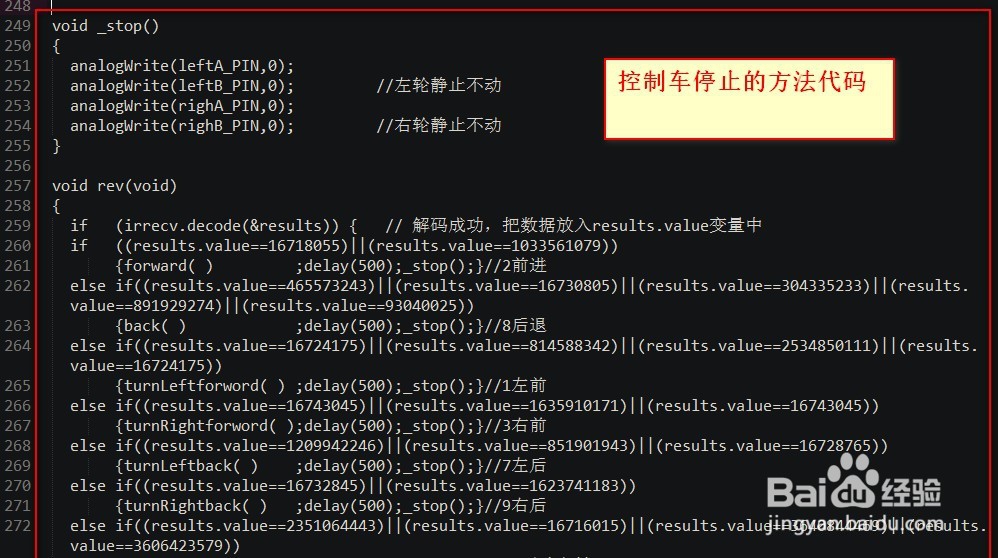
2、2.红外遥控处理的方法代码
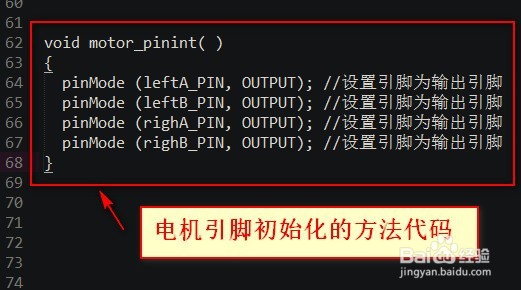
3、3.电机引脚初始化的方法代码
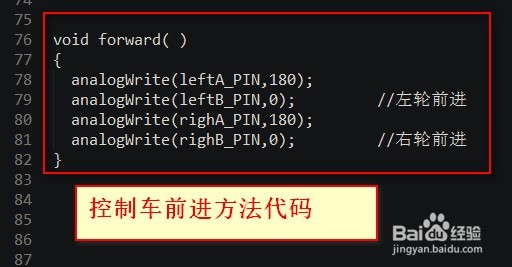
4、4.forward子函数——前进,子函数函数功能:控制车前进方法代码
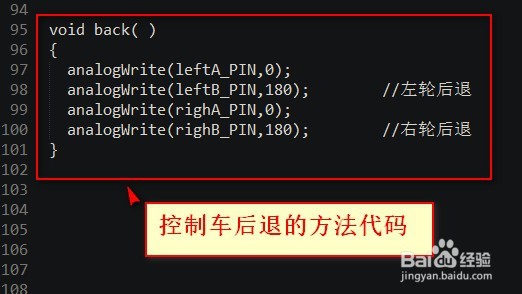
5、5.back子函数——后退子函数
函数功能:控制车后退的方法代码
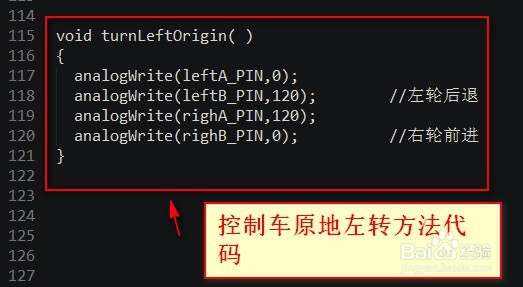
6、6.turnLeftOrigin子函数——原地左转子函数
函数功能:控制车原地左转方法代码
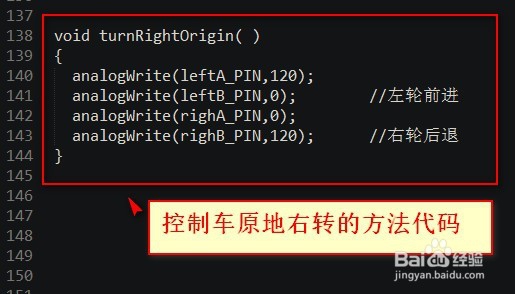
7、7.turnRightOrigin子函数——原地右转子函数
函数功能:控制车原地右转的方法代码
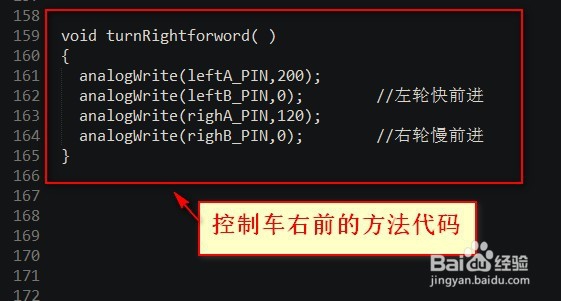
8、8.turnRightforword子函数——右前运动子函数
函数功能:控制车右前的方法代码
9、9.turnLeftforword子函数——左前运动子函数
函数功能:控制车左前的方法代码

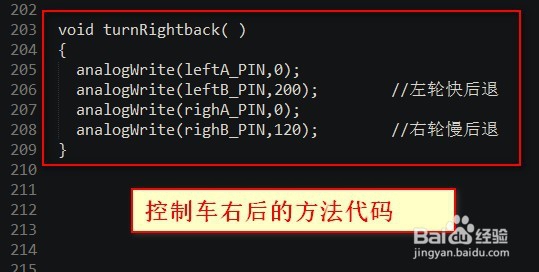
10、10.turnRightforword子函数——右后运动子函数
函数功能:控制车右后的方法代码
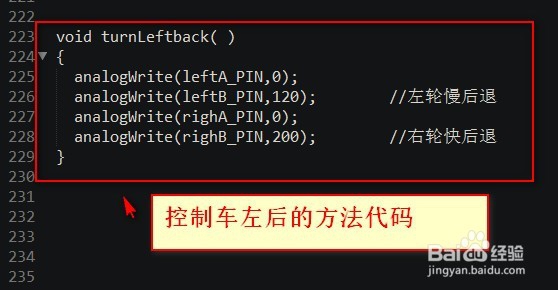
11、11.turnLeftforword子函数——左后运动子函数
函数功能:控制车左后的方法代码
12、12.stop子函数—停止子函数
函数功能:控制车停止的方法代码
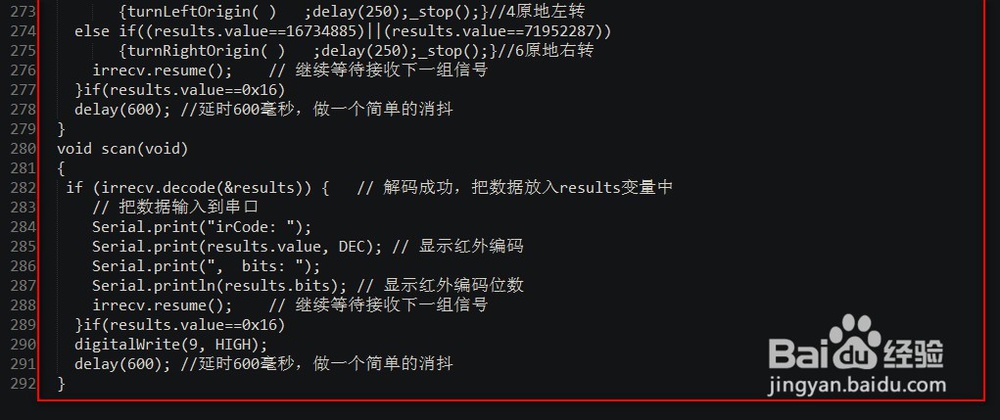
13、13.即开始测码值,然后下载程序的方法代码
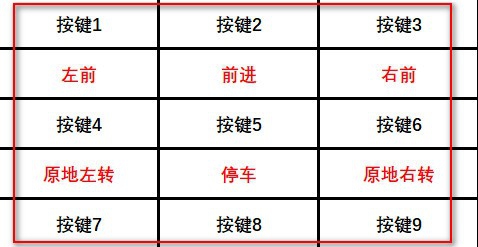
14、14.打开串口监视器,波特率设置为9600,使用遥控器对着红外头按下按键,串口监视器上就会出来当前按键的红外编码与位数。遥控器上的1-9九个按键,分别对应着小车的不同状态如下图
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:26
阅读量:96
阅读量:184
阅读量:125
阅读量:67