双目立体视觉—基本约束准则
1、立体视觉基本原理:
首先,从两个点或多个点观察同一物体,获取不同视角下的二维图像;
然后,根据三角测量原理计算空间点在二维图像的位置偏差;
最后,运用位置偏差进行三维重建。
z=fb/d;

2、立体视觉匹配基元:
匹配基元是用以进行立体匹配的图像特征,匹配基元的选择,要考虑基元的稳定性、敏感性、可行性和能否表示图像。
点:利用图像的局部特征信息作为匹配基元,表示一个像素,如像素灰度值,角点,边缘,卷积等。

3、块:局部区域内所有像素的灰度、亮度特征值,对区域内所有像素进行变化,
如卷积、梯度变换和Censes变换等。

4、线:一般是像素灰度信息发生急剧变化的像素点集,最能体现边缘特征。
检测边缘的算子如Sobel算子、Canny算子、Log算子和Prewitt算子等。
5、立体匹配约束准则:
约束准则具有缩小匹配搜索的范围,降低误匹配,同时提高匹配效率的功能。
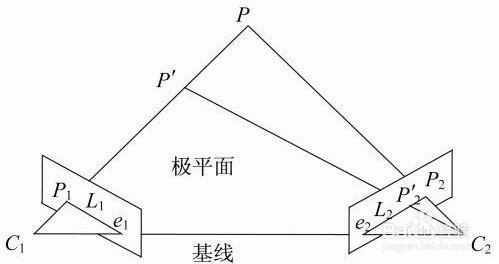
极线约束:
如图所示,
三维空间的一个映射点,其匹配点必定在另一图像的极线上,理想情况下,匹配点对位于同一水平线上即坐标y值相同。故只需在对应的水平线上搜素匹配点,大大提高了匹配效率。

6、唯一性约束:
三维空间点至多只一个图像上的映射点(遮挡则没有映射点),
匹配时左右图像上只有唯一一个匹配点。

7、连续性约束:
三维空间中物体表面是光滑的,匹配得到的视差图大部分情况下是连续且光滑变化的。
一般使用较小的视差梯度降低匹配的搜索范围和待匹配点的数量以提高匹配速度。

8、相似性约束:
三维空间中的物体在不同视角下投影产生的匹配基元(点、块、线)必须要有相同或相似的属性。
由于光照等因素的影响,相似性约束具有局限性。

9、顺序一致性约束:
三维空间中物体上的点的位置信息在映射到两幅图像上的位置顺序不会改变。
这是不透明物体表面投影的几何学必然性。

10、平滑性约束:
假设三维空间中物体表面是平滑的,
则视差图上除物体边界位置会有大的视差波动以外,
其他位置上匹配视差的变化很小。

11、左右一致性约束:
如图所示,
参考图上像素点p点在匹配图上的点是q,
则参考图上像素点q在匹配图上是p。
如果两次搜索的结果不对应,则改点不可靠。
常用于遮挡区域的检测。

12、视差范围约束:
两台摄像机之间具有一定的距离,
在沿极线搜索时,搜索的范围应小于一定的阈值。
视差范围约束限制了搜索的范围。
