Arduino 控制舵机编程实训(自带Servo 函数)
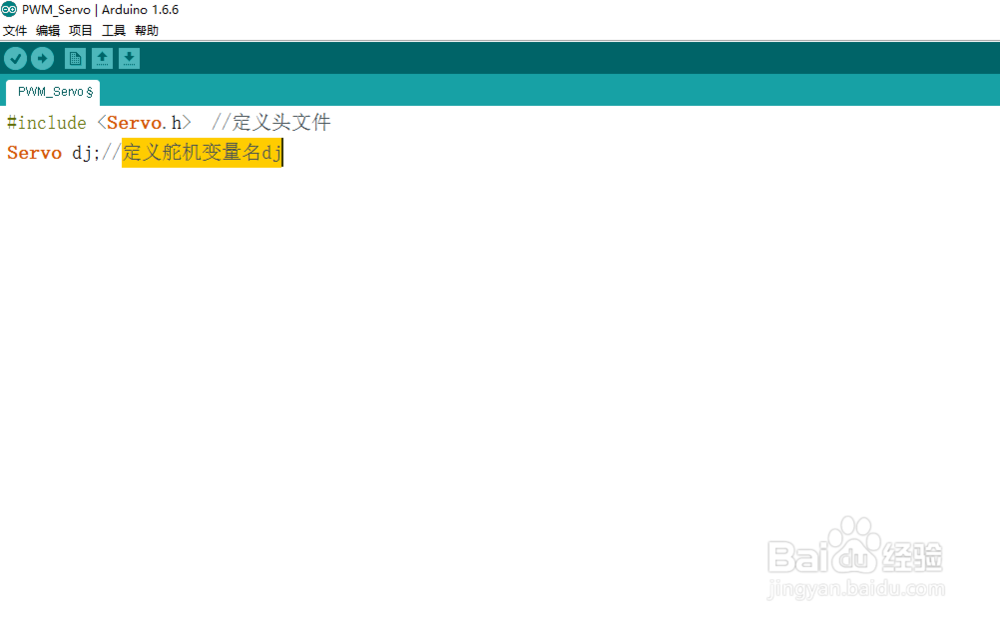
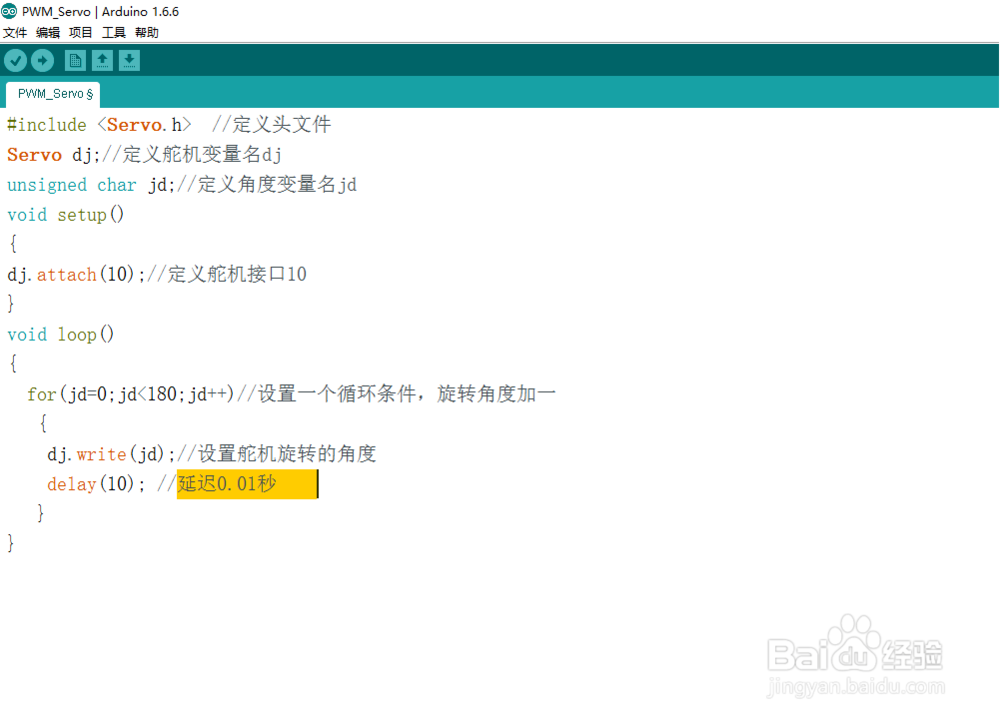
1、定义头文件

2、定义舵机变量名dj
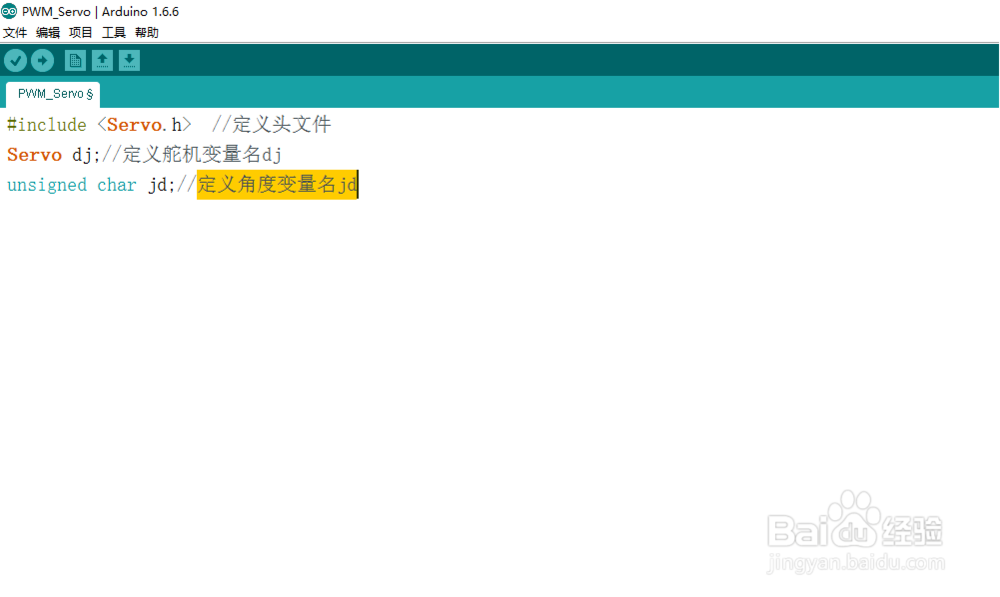
3、定义角度变量名jd
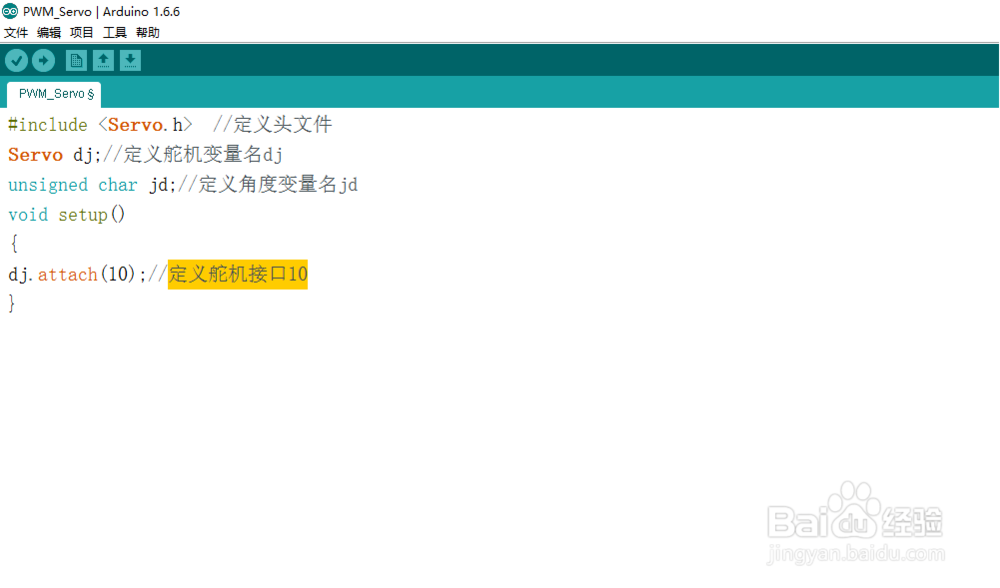
4、定义舵机接口10
说明:attach(接口):设定舵机的接口语句,数字9 或10 接口可利用。
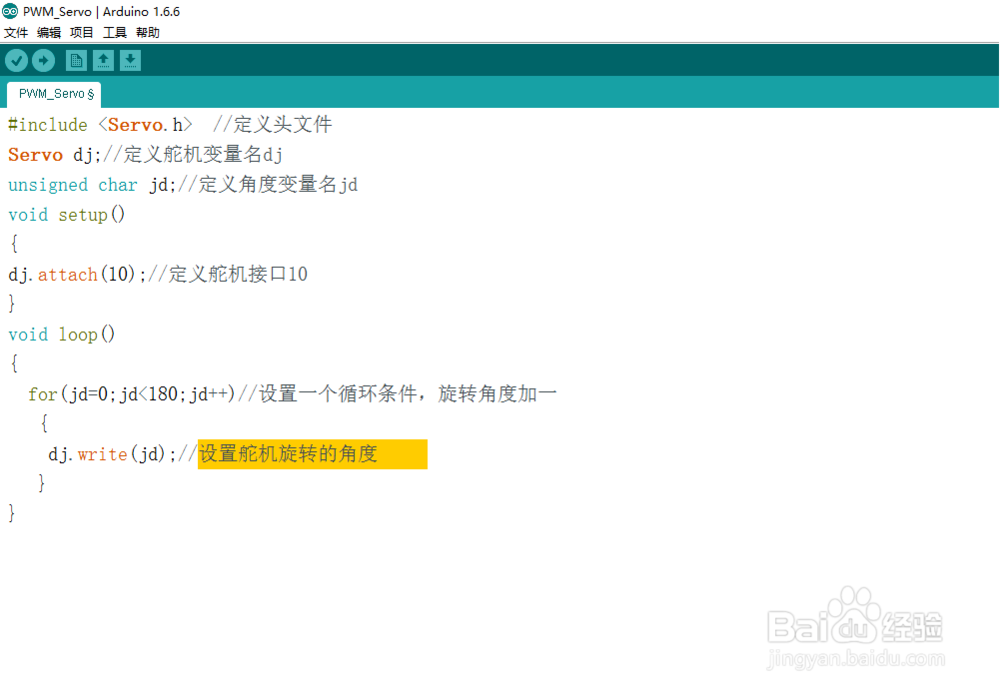
5、设置舵机旋转的角度
说明:write(角度):设定舵机旋转角度的语句,范围是0°到180°。
6、延迟0.01秒
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:128
阅读量:119
阅读量:99
阅读量:26
阅读量:130