如何分析杠杆模块?
1、库:Simscape / Foundation Library / Mechanical / Mechanisms。
如下图所示。

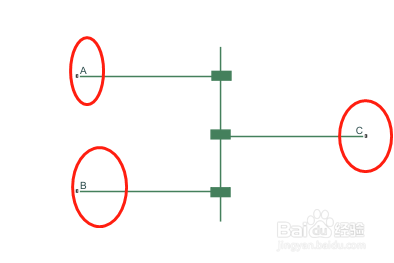
2、描述:杠杆块代表机械杠杆的一般形式,称为自由杠杆或求和杠杆,如下图所示。

3、在假设与初始位置的角度偏差较小的情况下,推导出求和杆方程,如下图所示。
vA、vB、vC为水平节理速度。
FA,FB,FC是水平联合部队。
lAC,lBC是臂长。

4、上述方程是在假定杠杆在节点C处的力和运动相加的情况下推导的。该假设是任意的,并且不会对如何将力或运动施加到杠杆上施加任何限制。换句话说,任何杠杆节点都可以是“输入”或“输出”节点,这取决于力的值。此外,任何块节点都可以连接到参考点,从而将三节点杠杆转换为一级杠杆,支点在中间,或者二级杠杆,支点在末端。
下面的插图显示了一个一流的杠杆,中间支点的示意图。

5、用以下方程式描述,如下图所示。
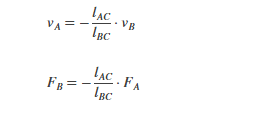
6、下一个插图显示了一个二级杠杆的示意图,支点位于节点A。

7、用以下方程式描述,如下图所示。

8、连杆机构示例说明了杠杆块在三种不同模式下的使用。连杆L_1和L_4模拟一级杠杆,支点在末端。联动装置L_2代表求和杆。连杆L_3模拟中间杠杆支点的二级杠杆。
就块方向性而言,如果关节与全局指定的正方向一致,则关节的绝对位移为正。
9、变量:
要在仿真之前设置块变量的优先级和初始目标值,请使用“块”对话框中的“变量”选项卡(或“块特性检查器”中的“变量”部分)。有关详细信息,请参见设置块变量的优先级和初始目标。
10、A — Node A of the lever
与杠杆的节点A相关联的机械平移守恒端口。
B — Node B of the lever
与杠杆的节点B相关联的机械平移守恒端口。
C — Node C of the lever
与杠杆的节点C相关联的机械平移守恒端口。
11、AC arm length — Arm length between nodes A and C
0.1 m (default)
节点A和C之间的臂长。
BC arm length — Arm length between nodes B and C
0.1 m (default)
节点B和C之间的臂长。
