UG10.0如何建模球头手柄?
1、如下图所示,
打开UG10.0软件,
新建一个空白的模型文件,
然后另存为“球头手柄”。

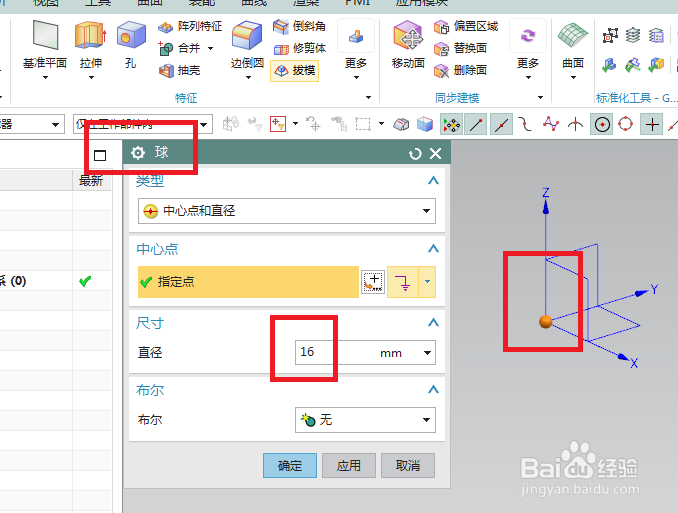
2、如下图所示,
执行【菜单——插入——设计特征——球】,
指定点:坐标原点,
设置尺寸:直径16,
点击确定。
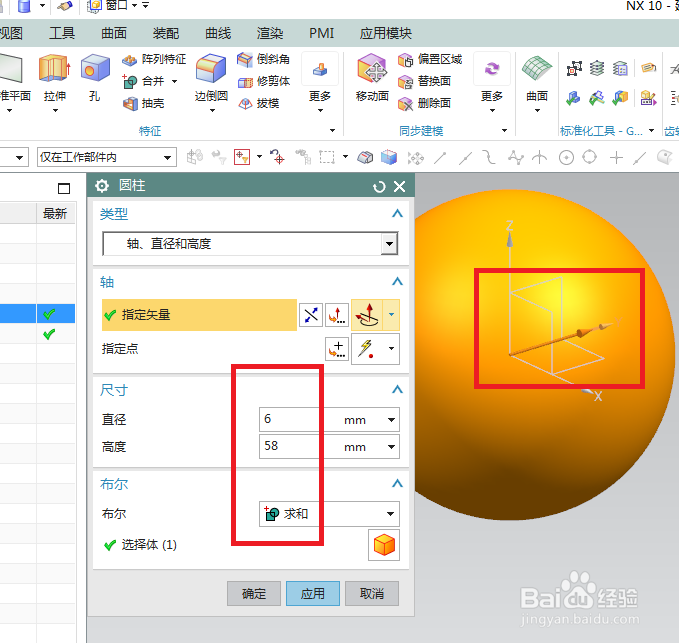
3、如下图所示,
执行【菜单——插入——设计特征——圆柱体】,
指定矢量Y轴,
设置尺寸:直径6,高度58,
布尔求和,
点击确定。
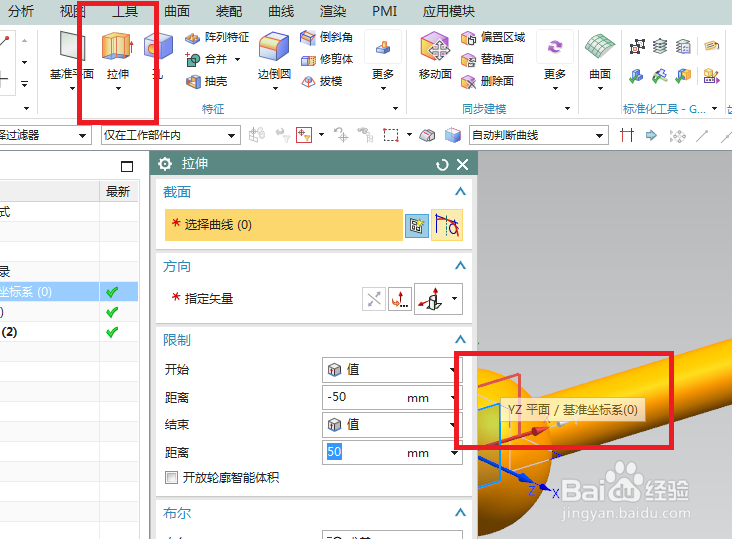
4、如下图所示,
执行【拉伸——YZ平面】,直接进入草图。
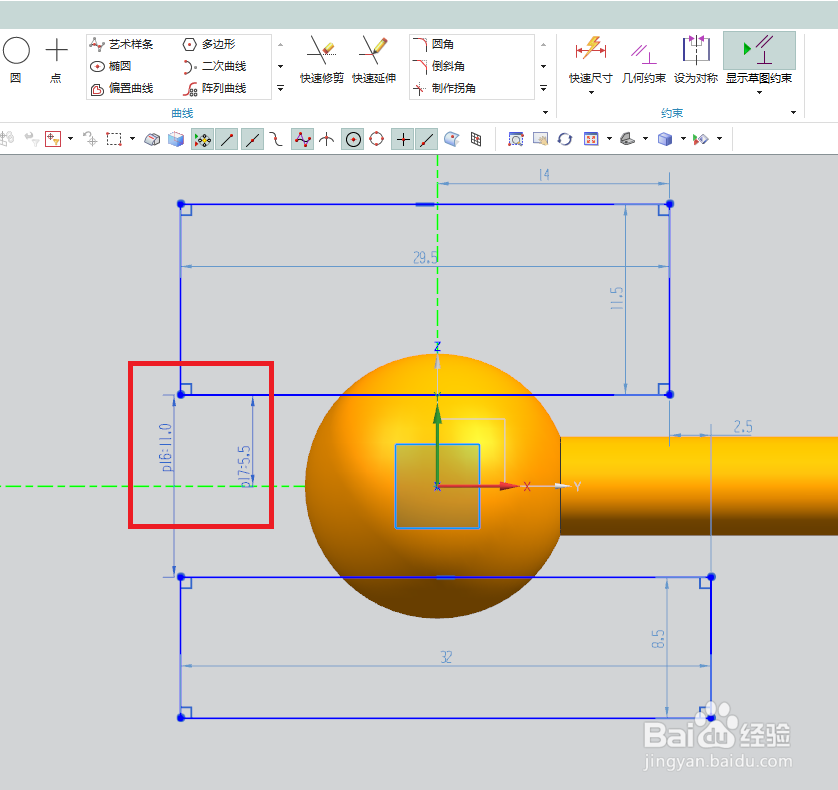
5、如下图所示,
激活矩形命令,画两个矩形分布在横轴两侧,
激活快速尺寸命令,标注尺寸:11.0、5.5,
点击完成,退出草图。
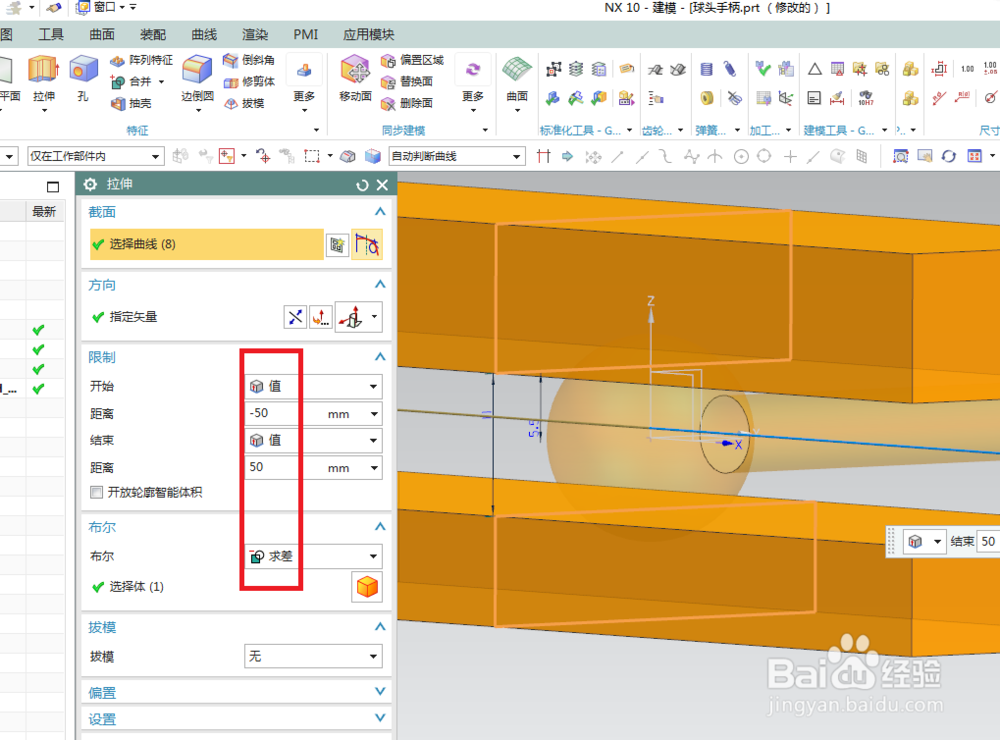
6、如下图所示,
回到拉伸对话框,
默认的限制是可以的,
布尔求差,
点击确定。
7、如下图所示,
执行【菜单——插入——设计特征——圆柱体】,
指定矢量Z轴,
方向向下,
指定点:上圆心,
设置尺寸:直径8,高度58,
布尔求差,
点击“应用”。

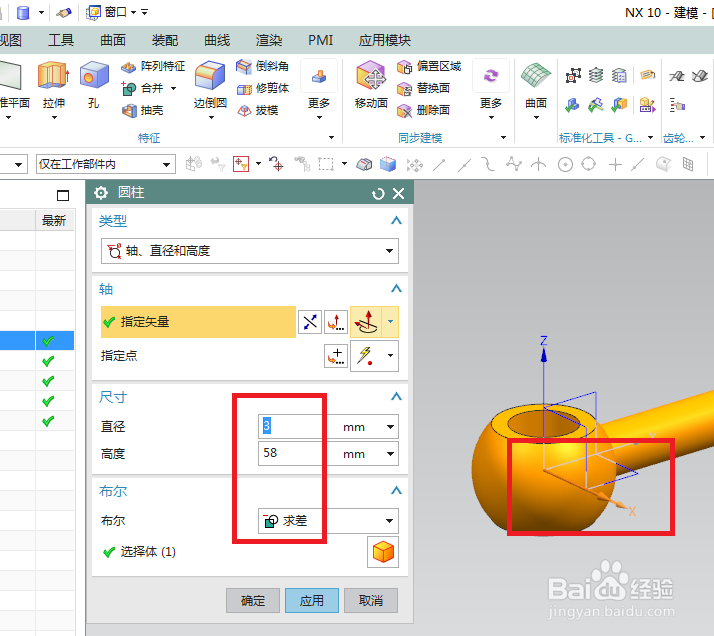
8、如下图所示,
指定矢量X轴,
设置尺寸:直径3,高度58,
布尔求差,
点击确定。
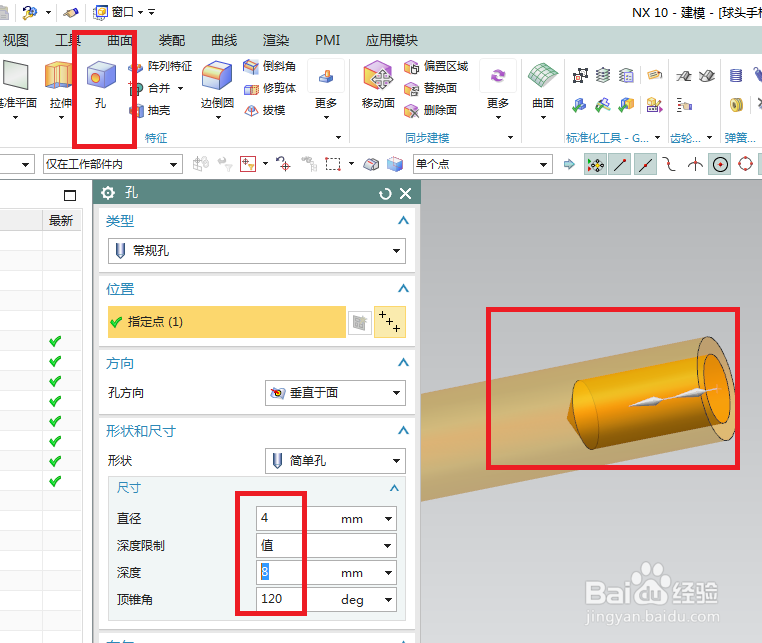
9、如下图所示,
点击工具栏中的“孔”图标,
点击圆柱体右边的圆心,
简单孔,设置尺寸:直径4,深度8,
点击确定。
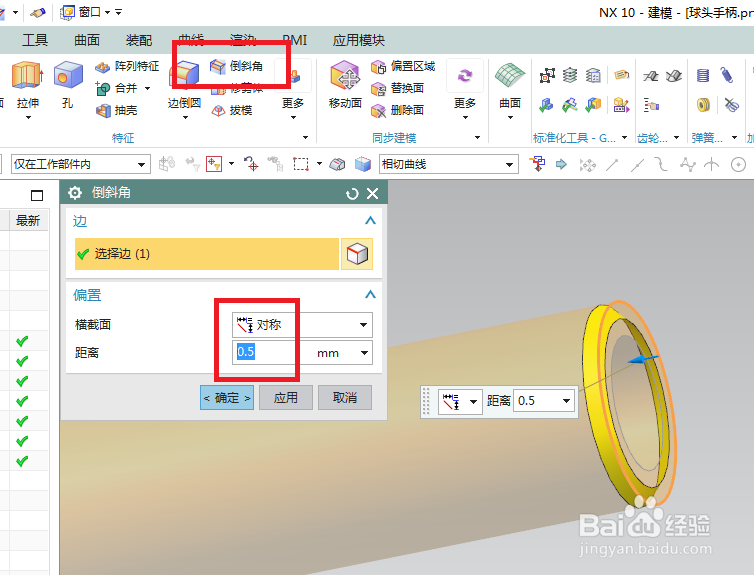
10、如下图所示,
点击工具栏中的倒斜角图标,
点击圆柱体的右边的外圆边线,
对话框中设置距离我0.5,
点击确定。
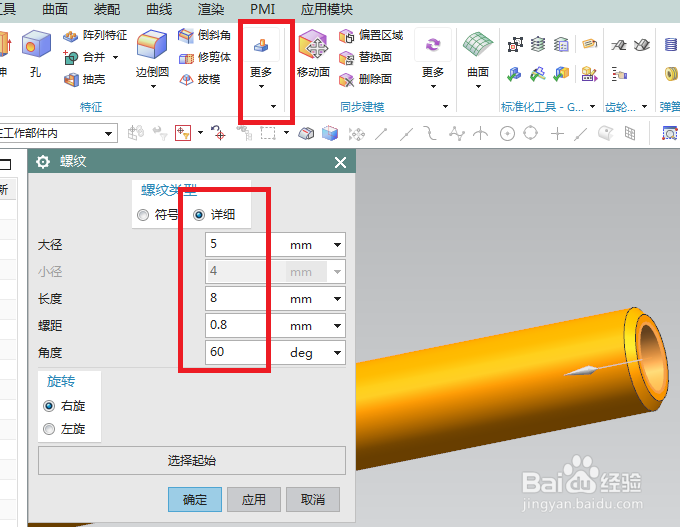
11、如下图所示,
执行【】更多——螺纹【】,
选择内孔侧面,
参数默认,
点击确定。
12、如下图所示,
隐藏基准坐标系,显示为着色,
渲染——真实着色——全局材料钢,
——
至此,
这个球头手柄就建模完成了。

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:123
阅读量:72
阅读量:65
阅读量:46
阅读量:64