smart plc 指令初步学习位逻辑输出示例
1、首先我们用到的位逻辑指令有,1号常开触点;2号常闭触点;3号否指令;4号上升沿,5号下降沿,6号线圈 7号置位,8号复位

2、这个程序我们分三段编写。编写程序如图,
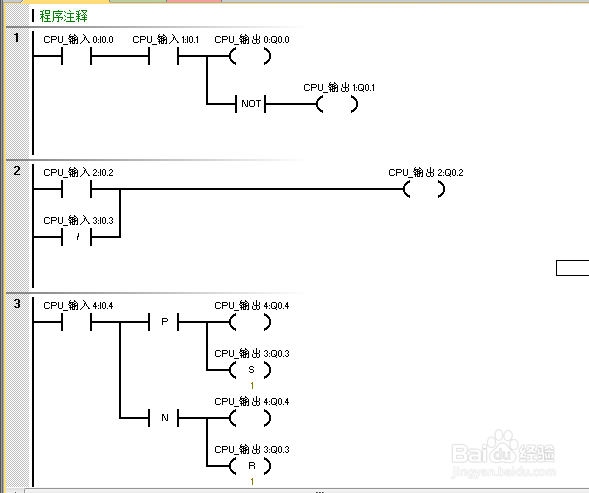
3、常开触点 I0.0 和 I0.1 必须接通(闭合)才能激活 Q0.0。NOT 指令用作取反器。 在 RUN 模式下,Q0.0 和 Q0.1 的逻辑状态相反。

4、常开触点 I0.2 必须接通或常闭触点 I0.3 必须断开,才能激活 Q0.2。一个或多个并联 LAD 分支(或逻辑)为真,才能激活输出。

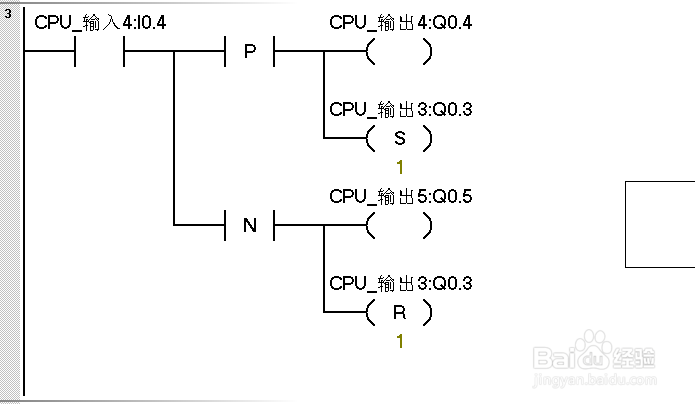
5、P 触点上出现上升沿输入或 N 触点上出现下降沿输入时会输出一个持续 1 个扫描周期的脉冲。 在 RUN 模式下,Q0.4 和 Q0.5 的脉动状态变化过快,无法在程序状态视图中监视。 置位和复位输出将脉冲状态锁存至 Q0.3,这使得此状态变化在程序状态视图中可见。
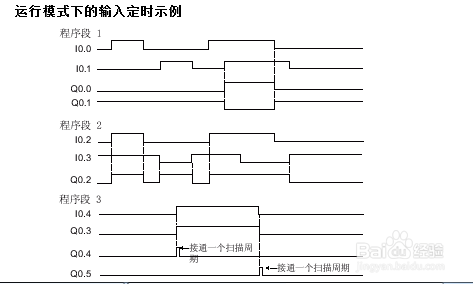
6、我们可以通过下面线性表格来看出,Q0.4是在上升沿一瞬间置1然后回0,Q0.5是在下降沿一瞬间置1然后回0。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:54
阅读量:184
阅读量:28
阅读量:150
阅读量:128