mio六足机器人拼装方法
1、将轮毂从mio车体上取下,左右两侧车体同步操作。


2、轮毂拆下后,使用m4*25mm螺丝*1、12孔铝件*1、13孔铝件*1、9孔铝件*1、M4自紧螺母*1 与轮毂按下图组装。
铝件按12、13、9孔铝件顺序固定在一起。





3、将弯九孔铝件用m4自紧螺母与m4*12mm螺丝固定在mio车体尾端,如下图所示
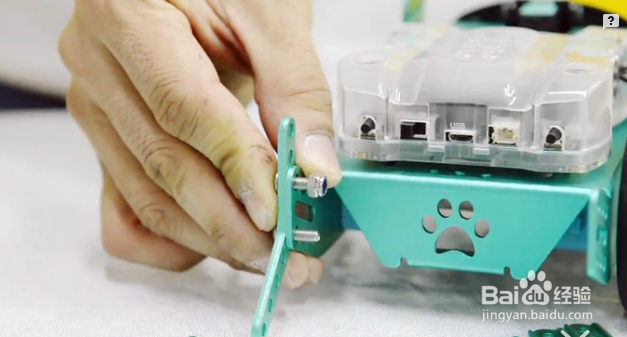


4、用m4自紧螺母、15mm垫片m4*12mm螺丝、m4*25mm螺丝将13孔铝件与9孔铝件固定,如图所示
5、用2mm、5mm垫片与m4自紧螺母、m4*16mm螺丝将7孔铝件按下图所示固定


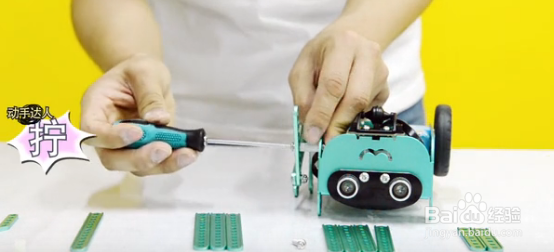
6、用m4*12mm螺丝、m4*25mm螺丝、m4自紧螺母、15mm垫片将9孔铝件固定,如下图所示:



7、六足机器人左侧安装完成,右侧机身按照左侧步骤操作。

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。