制作无线网络控制机器人
1、组装过程
你需要装配以下产品:齿轮箱,-坦克履带板,-工具集合板
我用螺母和螺栓去为ARDUINO、伺服和PING造了一个平台,我照着一般金属板的装置尺寸弄了另一个有机玻璃的平台。这激光笔可以装在伺服器的角上,
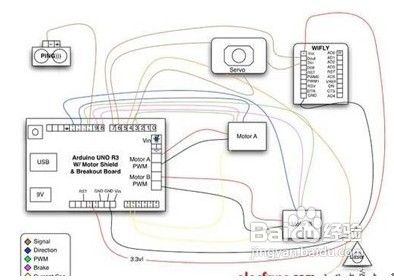
弄Arduino Motor Shield时虽然用了很多的插针,但你不能看到它,骤眼望过去就像是在内部用铁线连接的。下面就是连接图。
2、电源问题
这坦克马达需要很耗电,我不想AA电池或9V电池损耗得那么快,RC汽车团体已经花时间搞出了一个功耗稍微小点的产品,因此我选用了非常好的7.2V 1750ma电池和一个相当不错的Sport II充电器。
然后用一个接插头把电池接到马达外壳的接线柱上面。

3、坦克的代码加载方式
你要在这个页面加载坦克的代码。这一切都附加在代码上面了。

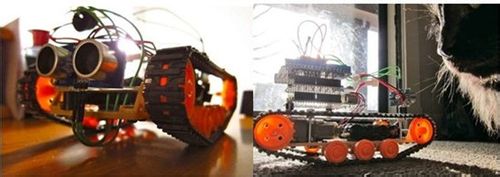
4、多次的组装——能躲避障碍物的坦克和网络控制的坦克
为了使设计更简单,我刚开始造了一个躲避物体的机器人。之后就附加上了马达、RC汽车可充电电池、Arduino和PING。
接下来我给机子加了个平台,然后再装上Wifly使坦克可以透过网络被控制。此刻这个控制就远程登录到2000端口发出一个指令
5、多次的组装——带有“激光枪”的坦克机器人
可以看出,这部分切割了一小块有机玻璃,然后在上面打了个洞,以便把伺服器安装到“控制平台”上。
网络界面
用PHP建立了一个坦克操控的网络界面,你还可以在如mac那类型运行apache 服务器的机器上加载这个,又或者将其放到一个服务器上,同时在如IPAD一样的设备上对这个页面进行远程访问。在这个页面给Wifly开了一个套接字,同时给他一个行为指令
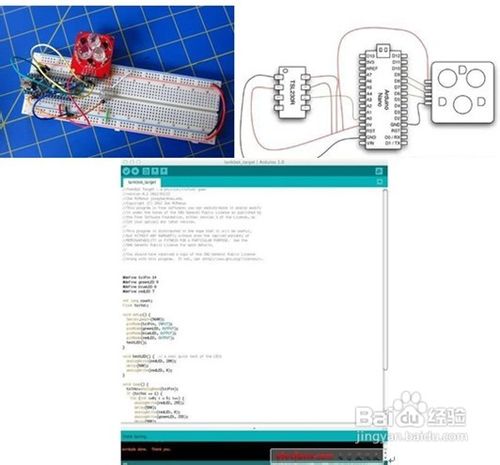
6、目标控制指示
用TSL230R、Arduino Mini 和Sparkfun三色LED制造这个目标。相比来讲,更愿意通过增大目标和更新页面去改进它。然后加载以上编码。下面就可以玩游戏
好的,现在一切都准备好了,我们可以开始玩这个游戏了。你可以驱动这部坦克,当你准备开火,你可以瞄准塔楼然后发射。你有三次开火机会:靶子射击、爆发式和喷射式。靶呢是一次射击,爆炸式射击是以30度角发射,喷射式发射角为180度。操作看看,这下练得怎么样?

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:148
阅读量:186
阅读量:56
阅读量:55
阅读量:103