ABB机器人带工具模型显示空间范围
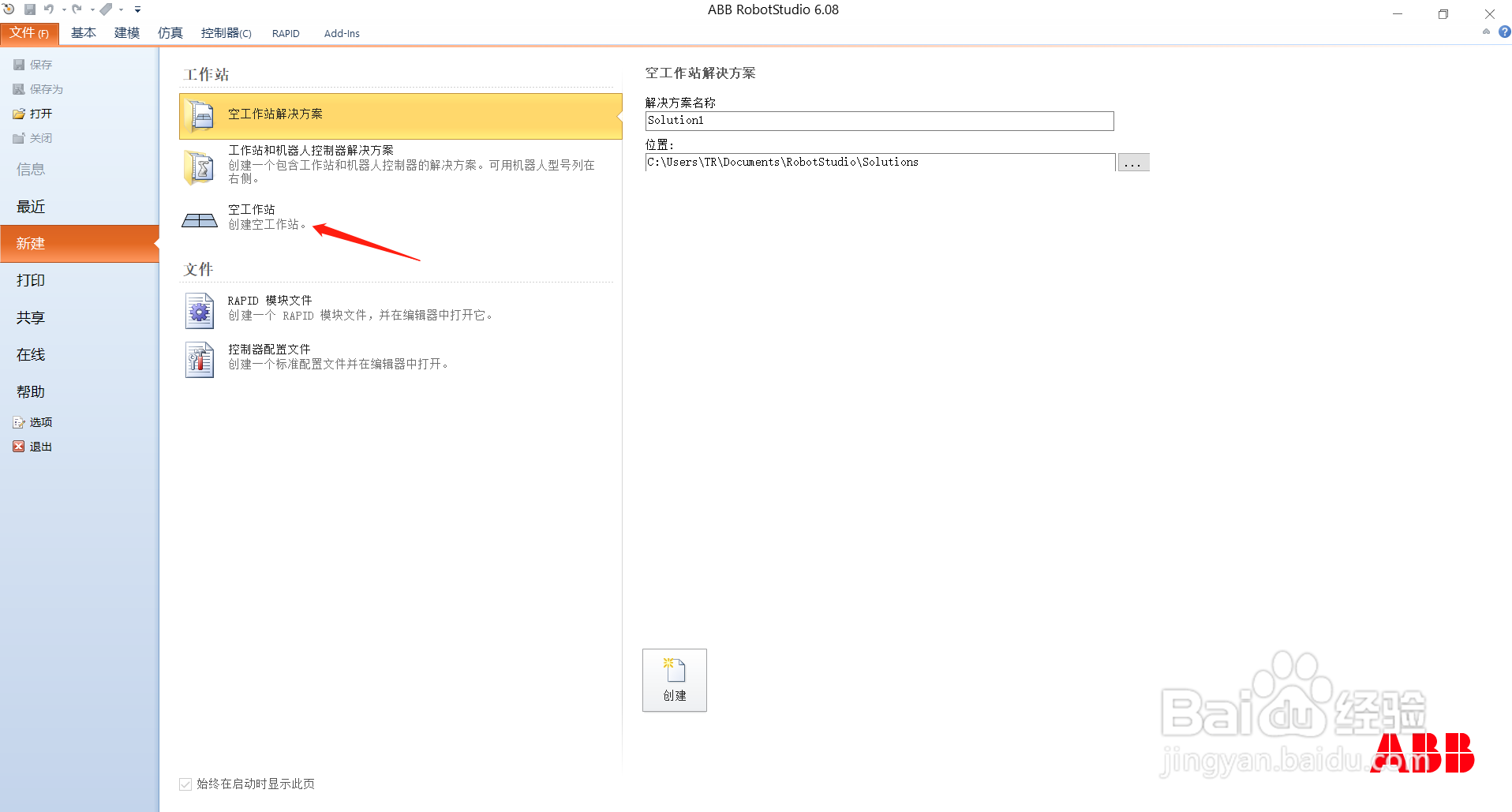
1、创建空工作站
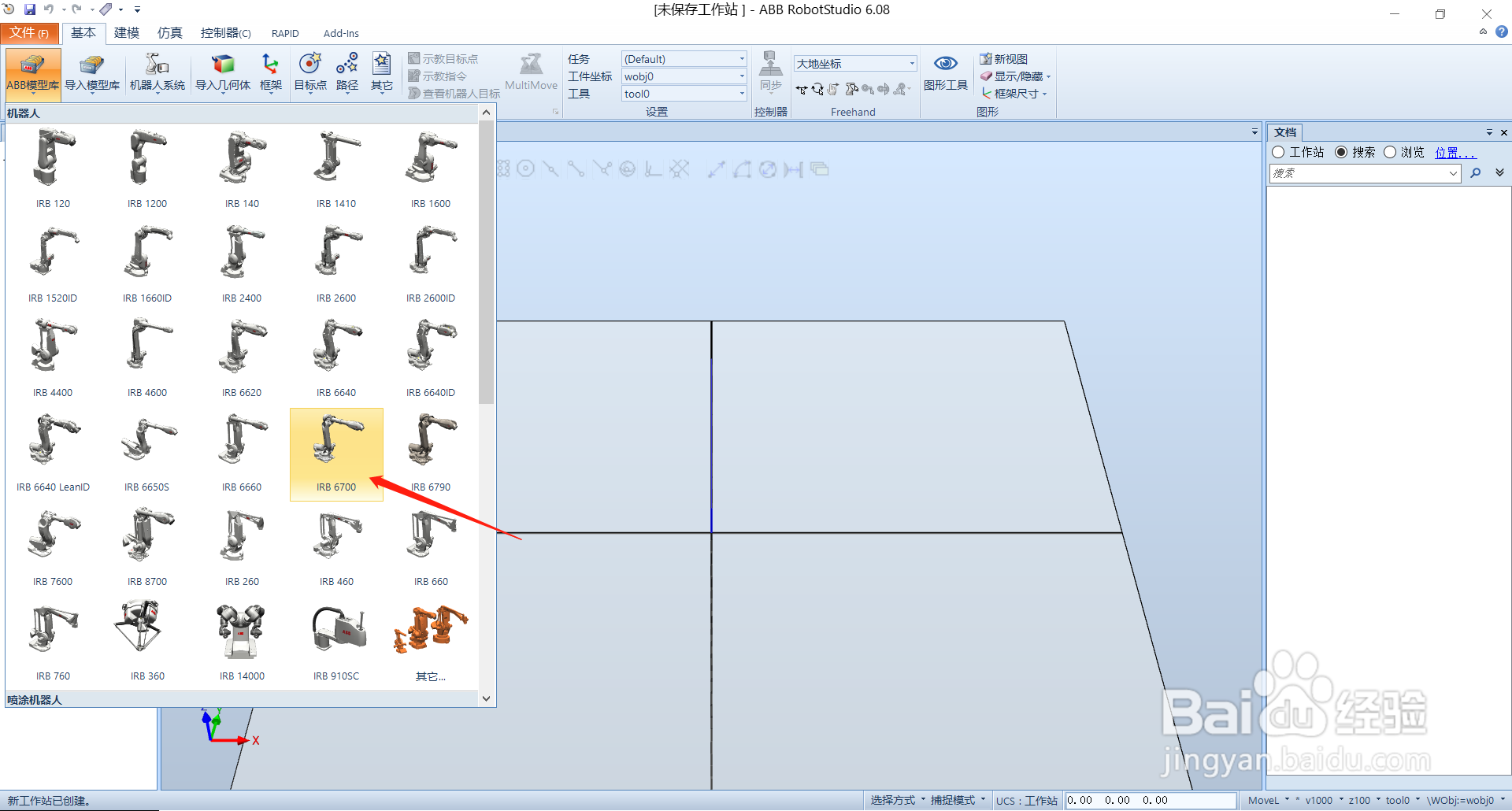
2、导入ABB模型库IRB6700
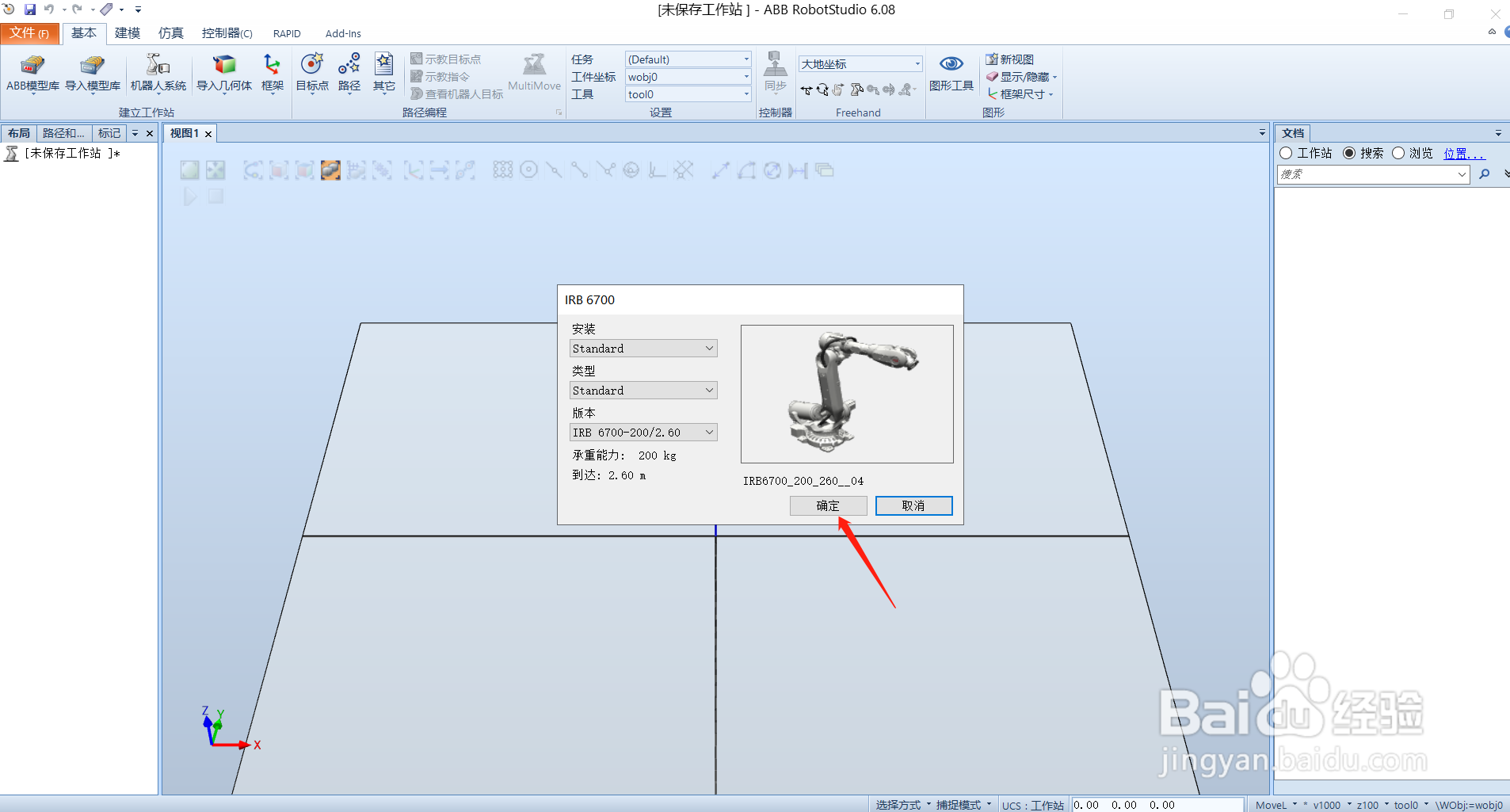
3、配置机械手
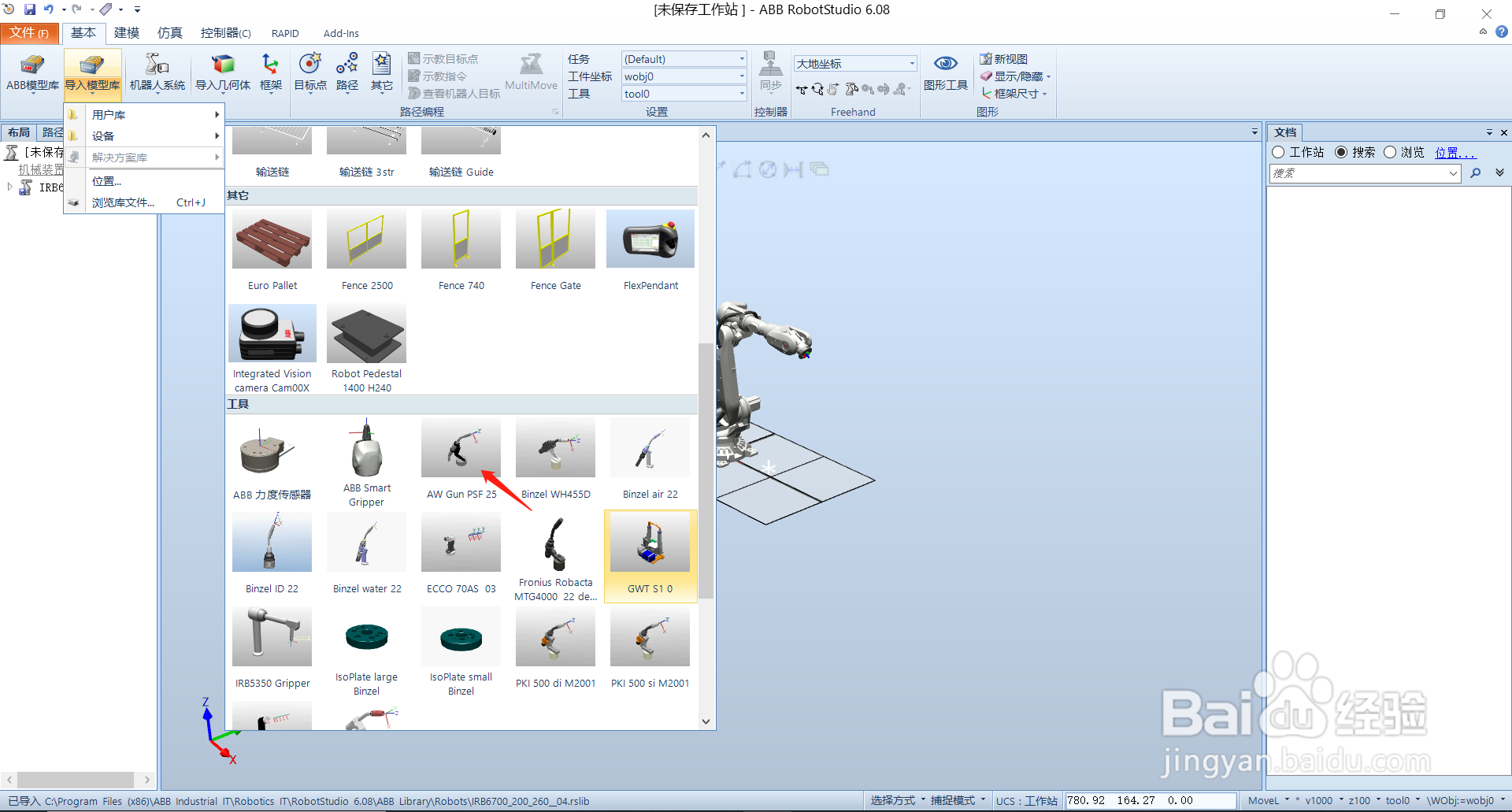
4、导入模型库焊枪
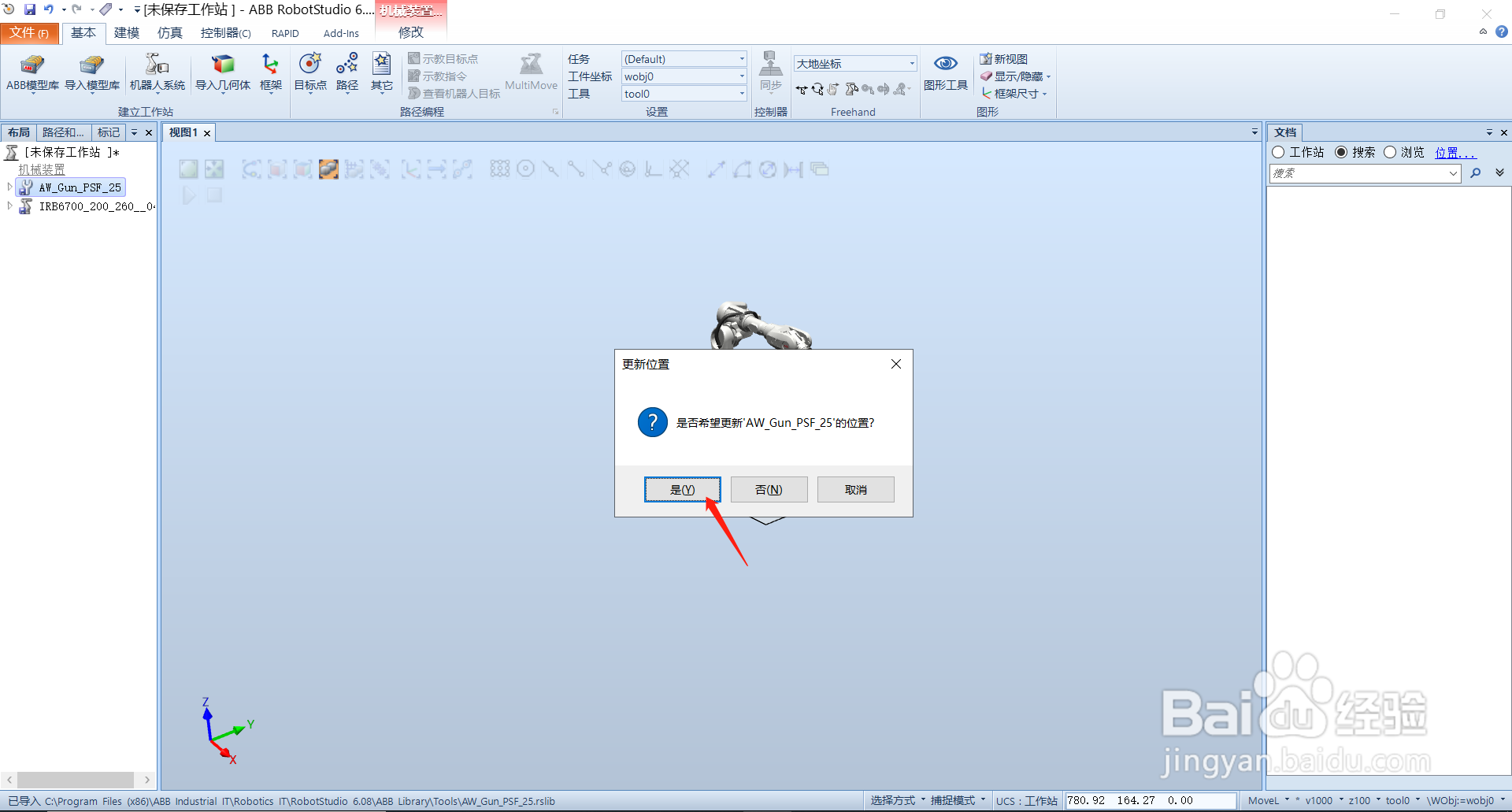
5、焊枪位置更新
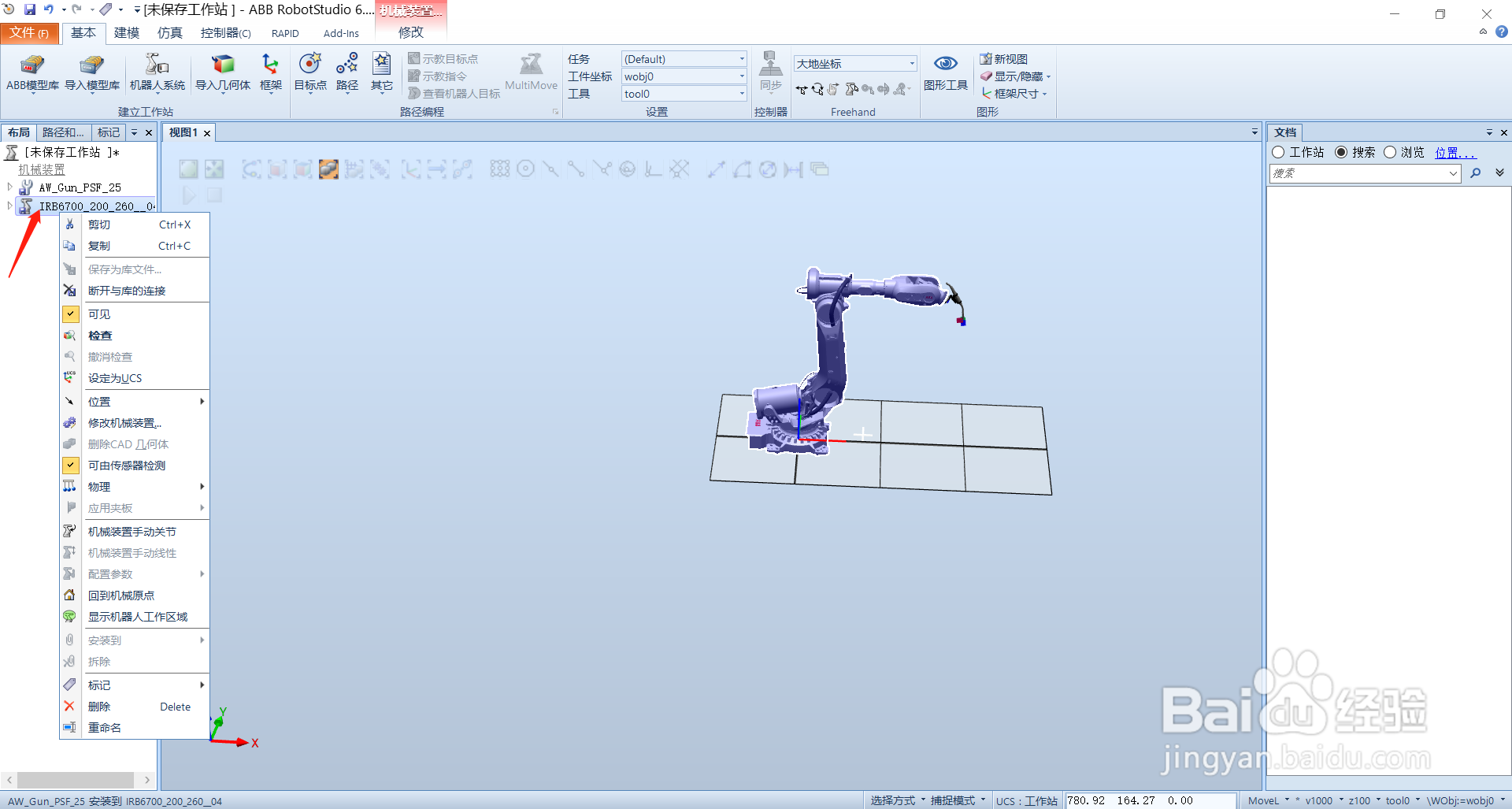
6、右击布局栏里面的IRB6700
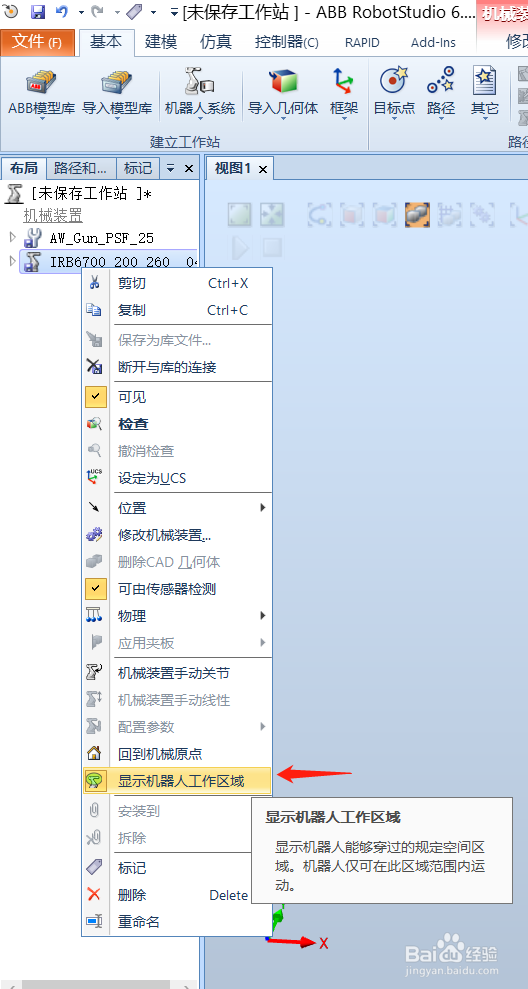
7、选择显示机器人工作区域
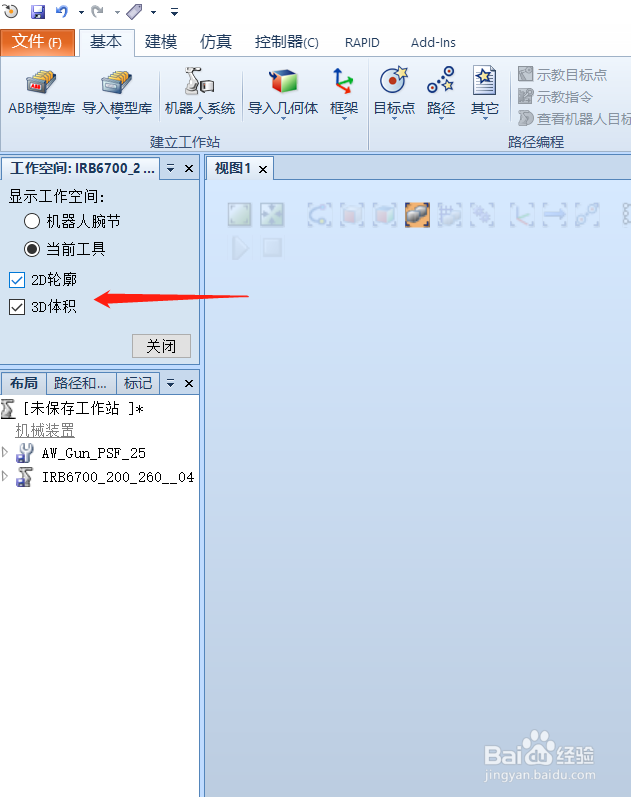
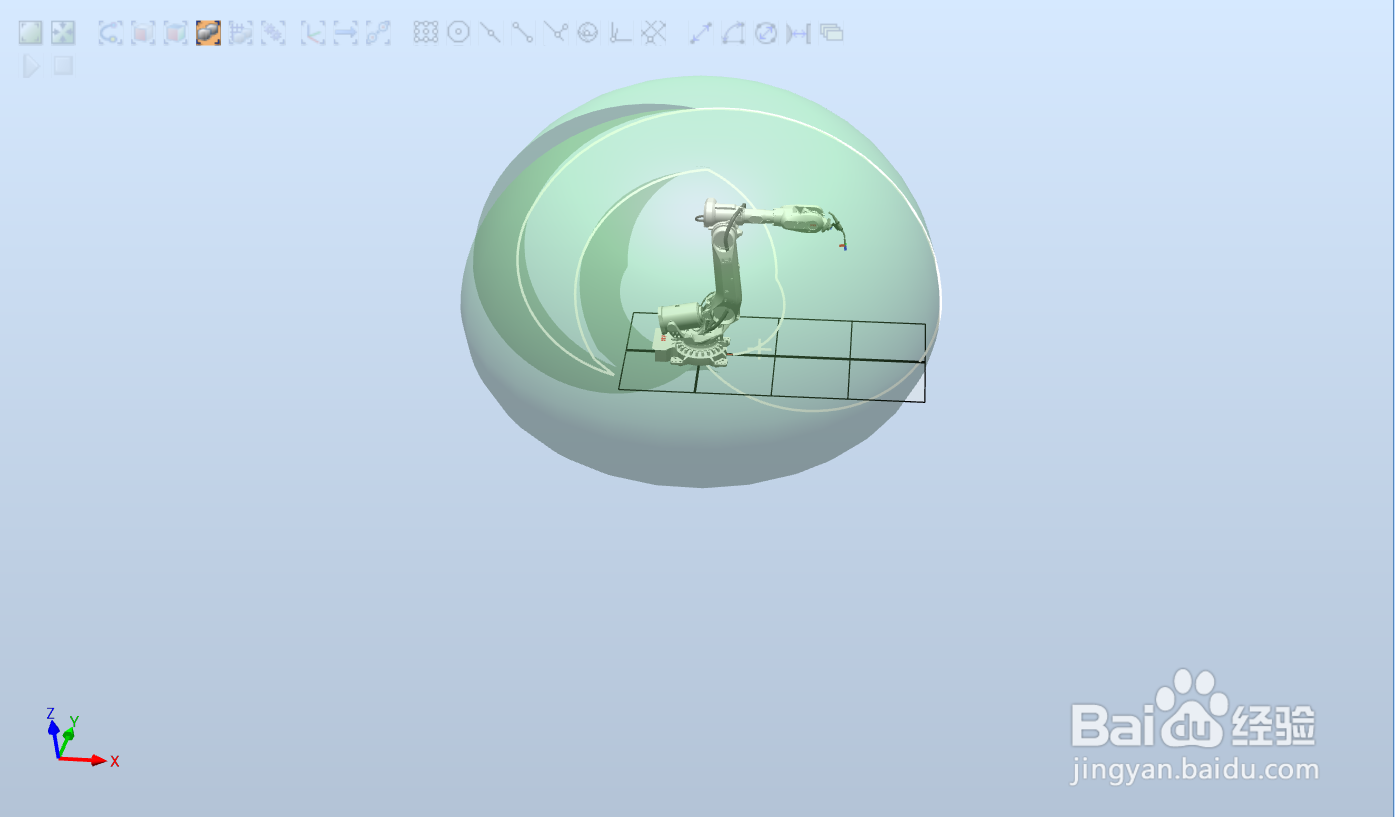
8、选择3D体积
9、查看机械手带工具的空间范围
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:186
阅读量:165
阅读量:35
阅读量:50
阅读量:46