ABB机器人示教器TCP坐标的设定
1、1.TCP(Tool Center Point)工具座标系是机器人运动的基准。
2、2.机器人的工具坐标系是由工具中心点TCP与坐标方位组成,机器人连动时,TCP是必需的。
3、3.当机器人夹具被更换,重新定义TCP后,可以不更改程序,直接运行。但是当安装新夹具后就必需要重新定义这个坐标系了。否则会影响机器人的稳定运行。
4、4.系统自带的TCP坐标原点在第六轴的法栏盘中心,垂直方向为Z轴,符合右手法则。注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式”
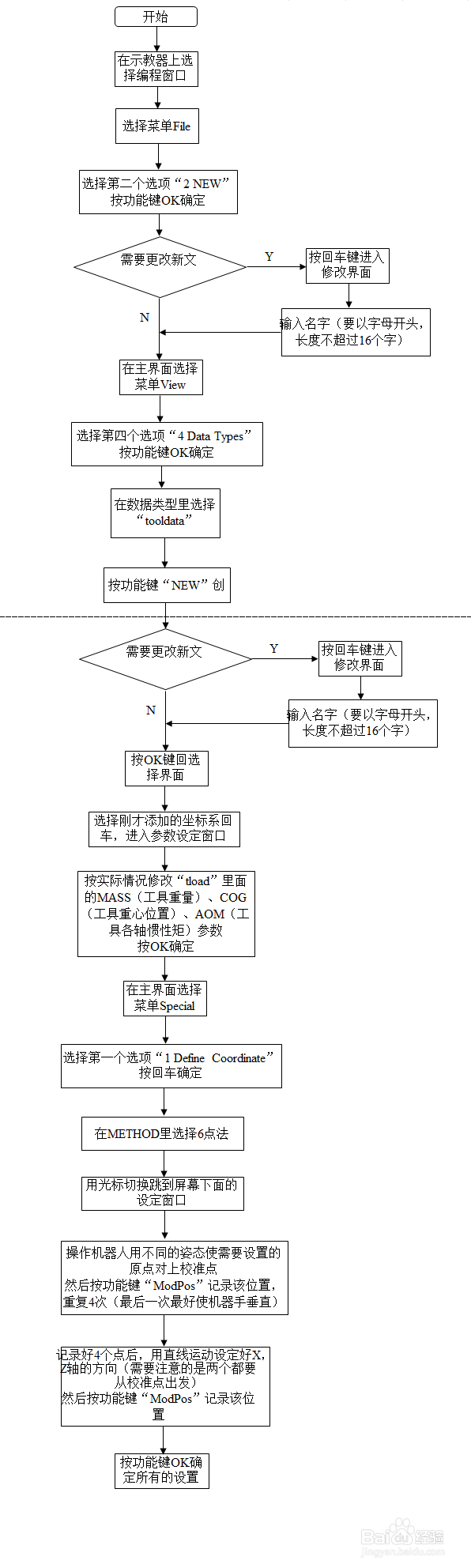
5、TCP(Tool Center Point)工具座标系的设定步骤
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:60
阅读量:39
阅读量:165
阅读量:153
阅读量:126