在RobotStudio中摆放周边模型
1、在“基本”功能选项卡中,在“导入模型库”下拉“设备”
列表中选择“propeller table”模型进行导入。

2、在“布局”中,选中机器人本体,单击右键,选择“显示机器人工作区域”。
白色区域为机器人可到达范围。
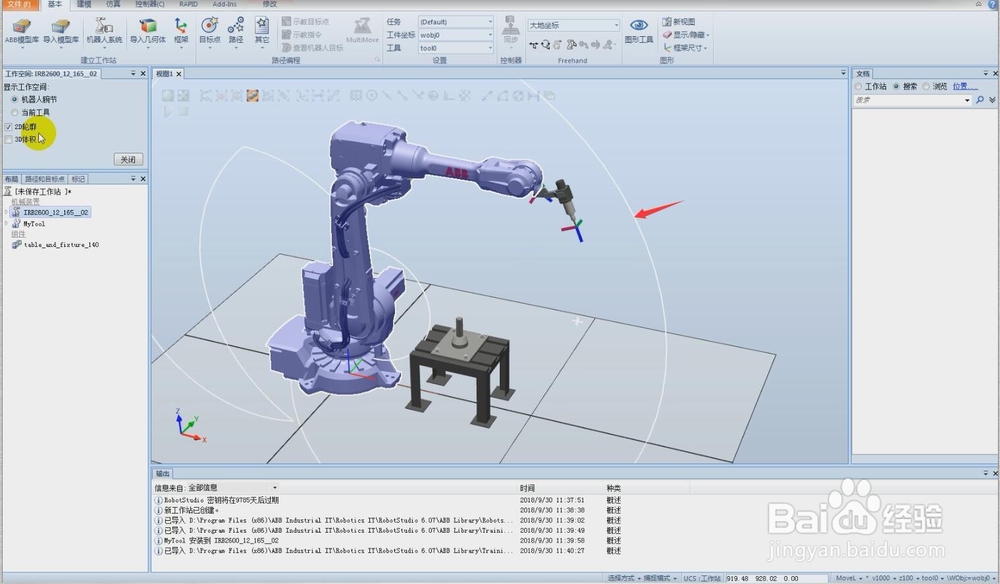
3、工作对象应调整到机器人的最佳工作范围,
这样才可以提高节拍和方便轨迹规划。下面将小桌子移到机器人的工作区域。
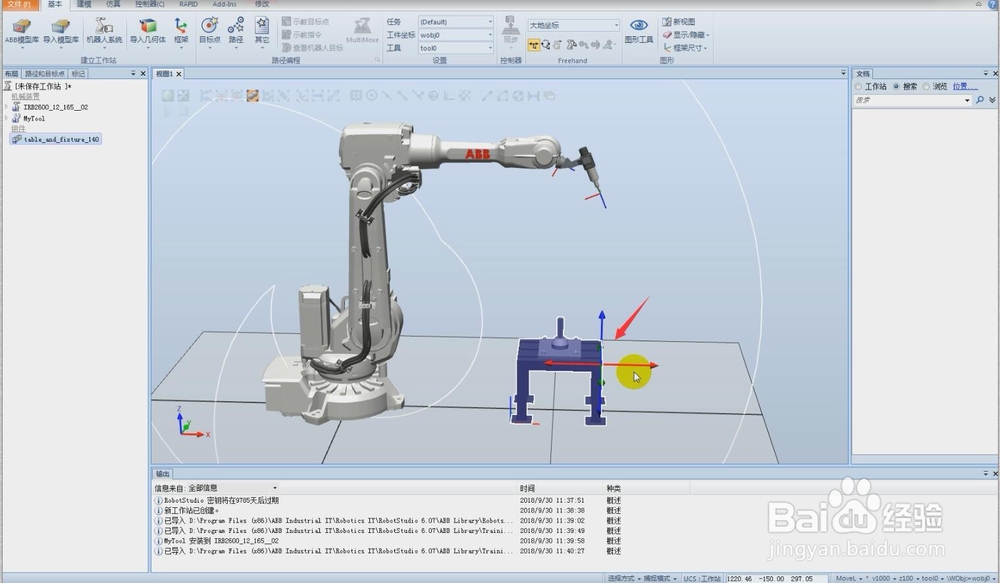
要移动对象,则要用到Freehand工具栏功能。
在Freehand工具栏中,选定“大地坐标”和单击“移动”按钮。
拖动箭头到达合适位置。

4、在“基本”功能选项卡中,选择“导入模型库”,
在下拉“设备”列表中选择“Curve Thing”,进行模型导入。

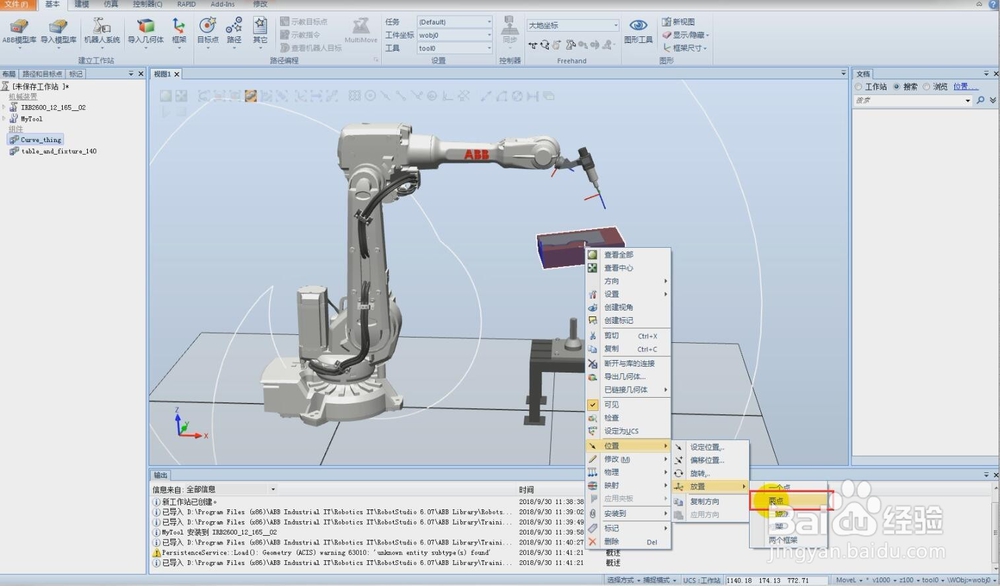
5、将“Curve Thing”放置到小桌子上去。
在对象上单击右键,选择“位置”单击“放置”中的“两点”。
6、为了能够准确捕捉对象特征,需要正确地选择捕捉工具。
将鼠标移动到对应的捕捉工具,则会显示详细的说明。
选中捕捉工具的“选择部件”和“捕捉末端”。
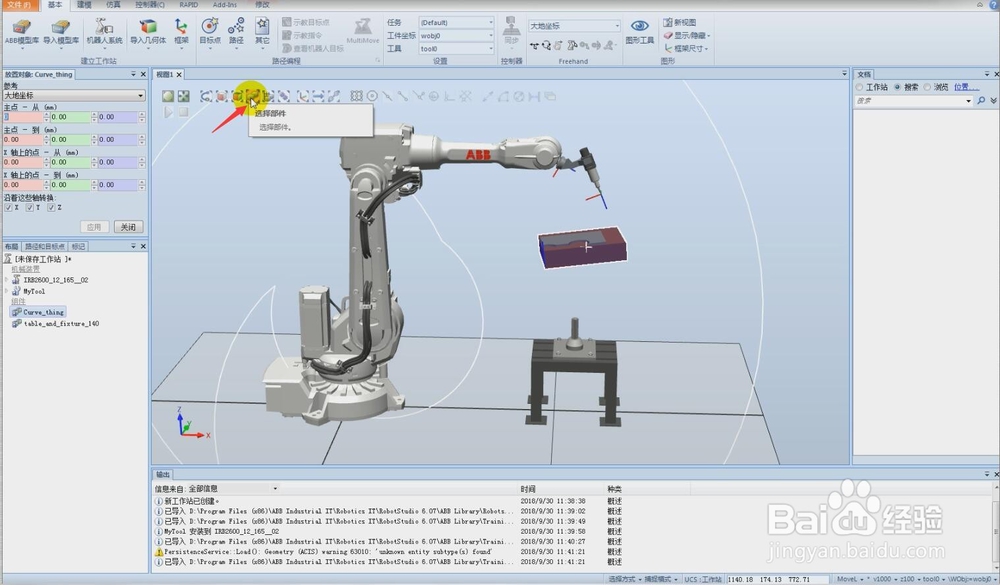

7、单击“主点-从”的第一个坐标框。

8、按照顺序单击两个物体对齐的基准线:
第1点与第2点对齐;
第3点与第4点对齐。
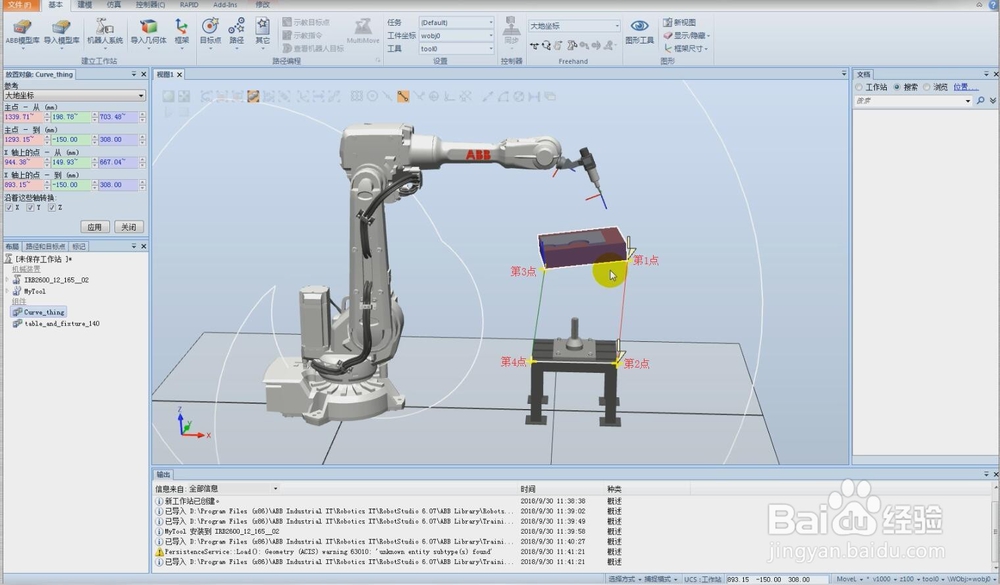
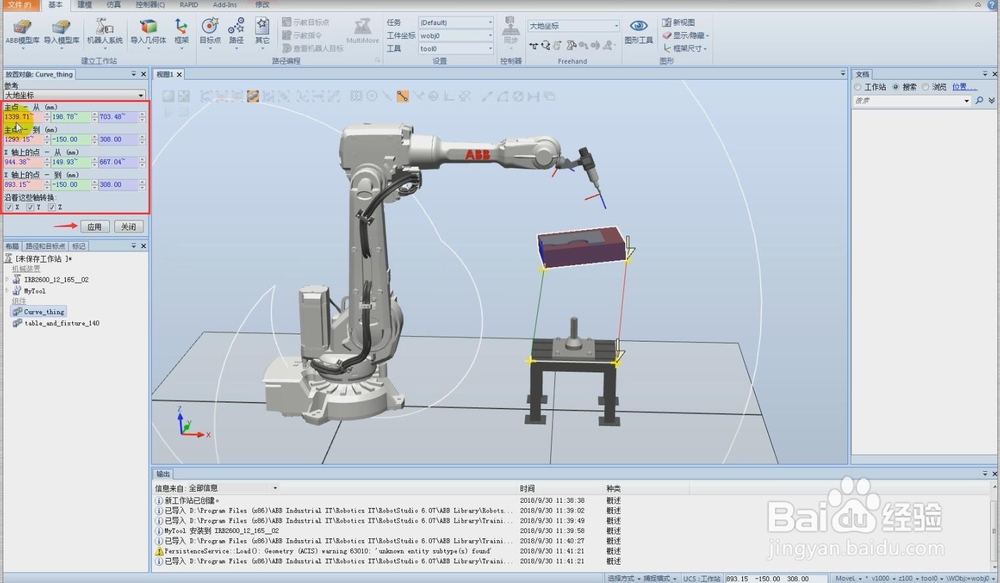
9、对象点位的坐标值已自动显示在框中,然后单击“应用”。
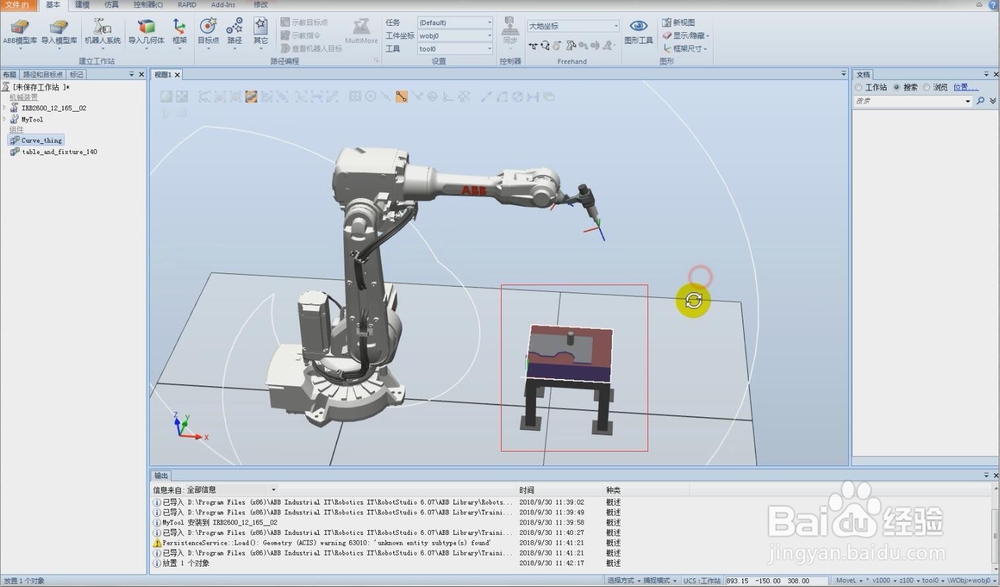
10、对象已准确对齐放置到小桌子上。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:151
阅读量:176
阅读量:155
阅读量:53
阅读量:160