利用KMbalancerII动平衡仪进行曳引机飞轮动平衡
1、在现场观察发现,由于电机一面被外壳全部包裹,没有可以加重的位置且拆装较麻烦,另一面曳引轮处预留有加重固定点,遂决定对其进行单面动平衡。
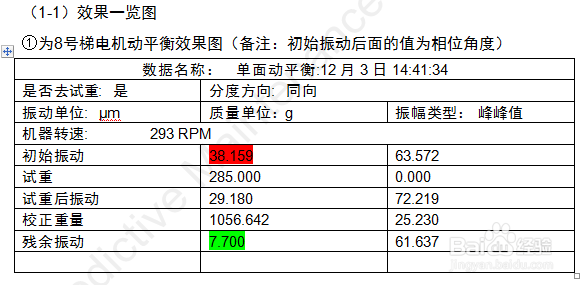
2、1号电机总振位移70μm左右,经过动平衡后总振动位移降低到40μm左右,动平衡为下图①。
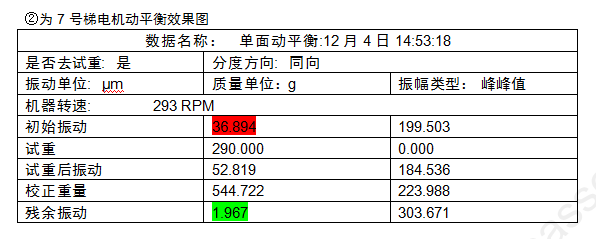
2号电机总振动位移为40μm左右,经过动平衡后总振动位移降低到4μm左右,动平衡为下图②。
3号电机总振动位移为130μm左右,经过动平衡后总振动位移降低到8μm左右,动平衡为下图③。
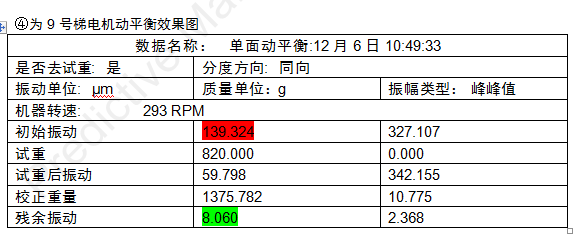
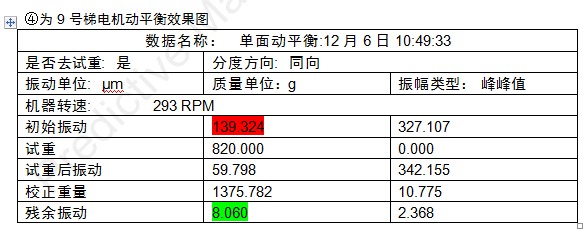
4号电机总振动位移为140μm左右,经过动平衡后总振动位移降低到11μm左右,动平衡为下图④。
下面为对电机进行动平衡的效果图以及现场图片:
3、现场图片,无任何配重支撑图。

4、图为固定支撑架。

5、对4台电机进行了动平衡,通过上述表格可以看出,已经将不平衡量降到很低,对于电梯电机这么大的曳引轮来说,效果已经非常明显及显著,对于总振动值的降低也取得了很明显的效果且可以判定有3台电机的振动是由于不平衡造成的。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:78
阅读量:42
阅读量:182
阅读量:167
阅读量:188