脚部绑定:反向动力学
1、1:IK就是我们所说的“反向动力学工具”;
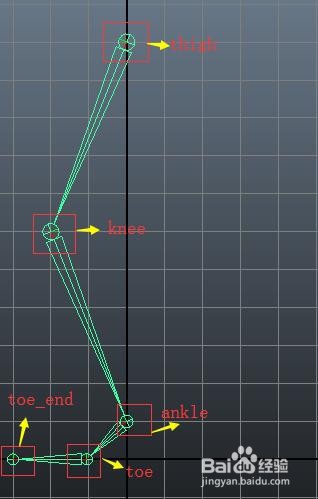
2、2:创建一节腿部骨骼,命名;
3、3:创建IK;
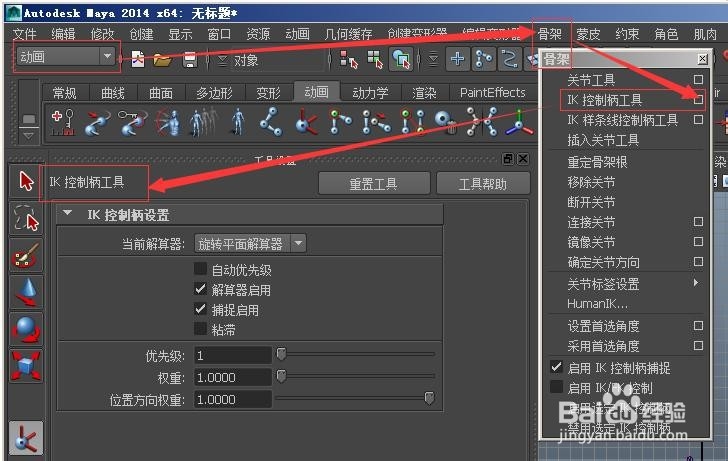
《1》在“动画”模块的“骨架”,点击“IK控制柄工具”的方框,打开Ik的工具设置;
《2》点击骨骼thigh+骨骼ankle,创建腿部IK;

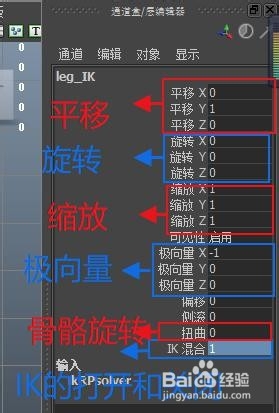
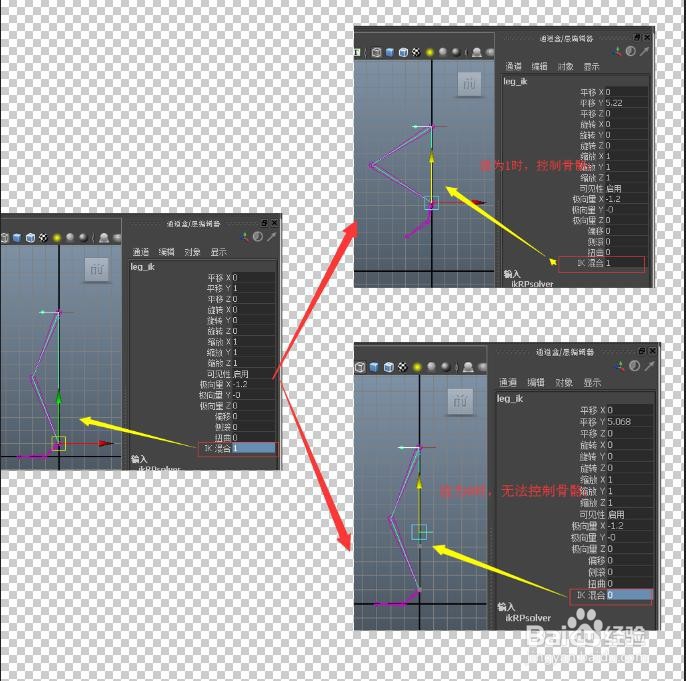
4、4:IK通道盒的基本属性;
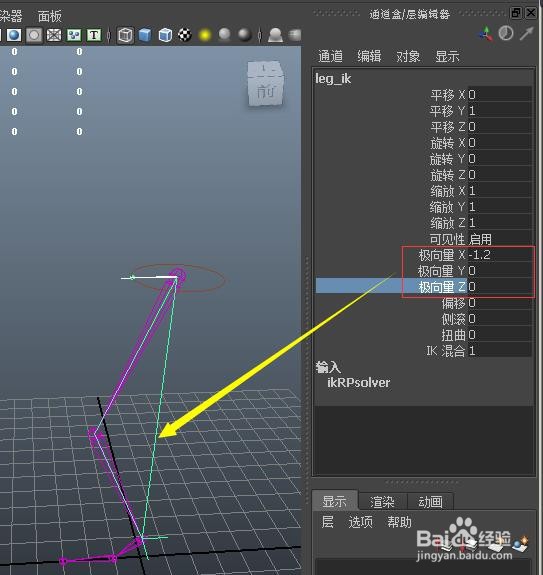
《1》极向量:
(1)极向量属性可以控制骨骼转动的方向;
(2)按“T”键+鼠标左键可以手动调整IK的极向量;
《2》IK的ik blend(IK混合)属性:值为1时,可以控制骨骼;
值为0时,无法控制骨骼;
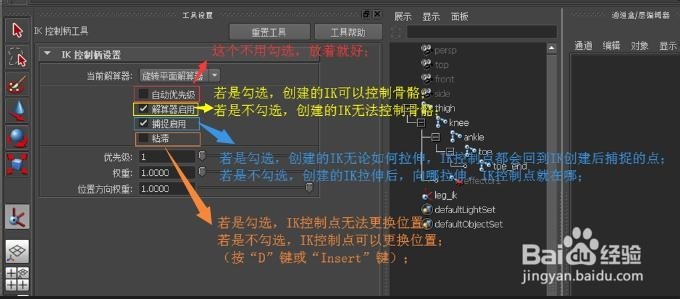
5、5:IK的创建属性;
《1》IK有两种解算器:
(1)单链解算器(ikSCsolve):极向量不可调整;
(2)旋转解算器(ikRPsolve):极向量可以调整;
《2》一般创建IK的时候只切换解算器,其他的不动;
《3》创建IK还有4个选项;


6、6:IK和FK的区别:
(1)IK:IK是反向动力学,可以用子级物体控制父级物体(如提线木偶的运动方式);
(2)FK:FK是正向动力学(如芭比娃娃的运动方式);
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:175
阅读量:38
阅读量:33
阅读量:136
阅读量:78