简单数字频率计设计
1、频率测量的方法常用的有测频法和测周法两种。
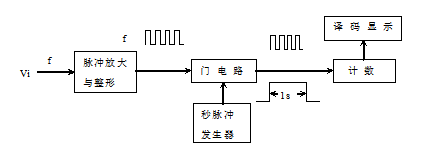
测频法的基本思想是让计数器在闸门信号的控制下计数1秒时间,计数结果是1秒内被测信号的周期数,即被测信号的频率。若被测信号不是矩形脉冲,则应先变换成同频率的矩形脉冲。测频法的原理框图如图所示。
图中,秒脉冲作为闸门信号,当其为高电平时,计数器计数;低电平时,计数器停止计数。显然,在同样的闸门信号作用下,被测信号的频率越高,测量误差越小。当被测频率一定时,闸门信号高电平的时间越长,测量误差越小。但是闸门信号周期越长,测量的响应时间也越长。
2、当被测信号频率较低时,为保证测量精度,常采用测周法。即先测出被测信号的周期,再换算成频率。测周法的实质是把被测信号作为闸门信号,在它的高电平的时间内,用一个标准频率的信号源作为计数器的时钟脉冲。若计数结果为N,标准信号频率为f1,则被测信号的周期为
T = T1·N
被测信号的频率为
f = 1/T1·N = f1/N
利用测周法所产生的最大绝对误差,显然也等于±1个标准信号周期。如果被测信号周期的真值为T真= T1·N,则T测= T1·(N±1)
σmax= (f测-f真)/ f真= T真/T测 – 1=±1/(N±1)
由上式可知,对于一定的被测信号,标准信号的频率越高,则N的值越大,因而相对误差越小。
3、低频段的测量
鉴于上述困难,对于低频信号,为了达到规定的精度,要采取一些比较特殊的方法。例如,可考虑将被测信号倍频后再用测频法测量。或将闸门信号展宽。由于倍频电路比较复杂,所以一般采用后一种方法,实际上闸门信号展宽与被测信号倍频在效果上是相同的。闸门信号展宽比较容易做到,例如采用分频电路就可以实现。若闸门信号高电平时间从1秒展宽到10秒,则相对误差可以按比例下降,但响应时间也增大相同的比例。
4、显示方式:共用右边四个数码管,左三个显示数据,最右端一个显示单位,为0时单位为Hz,为1时单位为Khz
5、代码:
//#include<c8051F330.h>
#include<ZLG7289.h>
#include<init.h>
#define uint unsigned int
uint a,b,c,d;
unsigned long x;
unsigned long count;
unsigned char flag=0;
void Timer0_Init()interrupt 1
{
TH0=(65535-10000)/256;
TL0=(65535-10000)%256;
if(++count==40)
{
count=0;
TR1=0;
x=TH1*256+TL1;
TH1=0;
TL1=0;
TR1=1;
flag=1;
}
}
void show(void)
{if(x>=10&&x<100)
{
a=0;
b=x*10%100;
c=x/10;
d=x%10;
ZLG7289_Download(1,7,0,a);
ZLG7289_Download(1,6,0,b);
ZLG7289_Download(1,5,1,d);
ZLG7289_Download(1,4,0,c);
}
else if(x>=100&&x<1000)
{
a=0;
b=x/100;
c=x%100/10;
d=x%10;
ZLG7289_Download(1,7,0,a);
ZLG7289_Download(1,6,1,d);
ZLG7289_Download(1,5,0,c);
ZLG7289_Download(1,4,0,b);
}
else if(x>=1000&&x<10000)
{
a=x/1000;
b=x%1000/100;
c=x%100/10;
d=1;
ZLG7289_Download(1,7,0,d);
ZLG7289_Download(1,6,0,c);
ZLG7289_Download(1,5,0,b);
ZLG7289_Download(1,4,1,a);
}
}
main(void)
{
system_init();
systemclk_init();
port_init();
ZLG7289_Init(40);
ZLG7289_Reset();
timer_init();
while(1)
{
if(flag==1)
{
show();
flag = 0;
}
}}
#include <C8051F330.h>
#include <port.h>
void system_init()
{
PCA0MD&=~0x40;
}
void systemclk_init()
{
OSCICL=OSCICL+42; //设置内部振荡器为24MHZ
OSCICN|=0x01; //内部振荡器4分频
}
void port_init()
{
P0SKIP=0x00; //跳过P0.0做INT0.P0.1做INT1(P0.6,P0.7模拟输出不跳)
P1SKIP=0x00; //跳过P1.2,P1.3,P1.4
XBR0=0x00; //交叉开关使能UART0
XBR1=0x60; //打开交叉开关
//IT01CF=0x10; //INT0配置在P0.0,INT1配置在P0.1
P0MDIN=0xFF; //数字输入
P1MDIN=0xFF;
P0MDOUT=0xFF; //推挽
P1MDOUT=0xFF;
}
void timer_init()
{
TMOD=0X51;
TH0=(65535-2500)/256;
TL0=(65535-2500)%256;
EA=1;
ET0=1;
TR1=1;
TR0=1;
}
#ifndef __port_H_
#define __port_H_
void system_init(void);
void systemclk_init(void);
void port_init(void);
void timer_init(void);
#endif