气缸与步进电机混合控制的实现方法
1、一、单轴步进电机与气缸的混合控制
1、接线方法
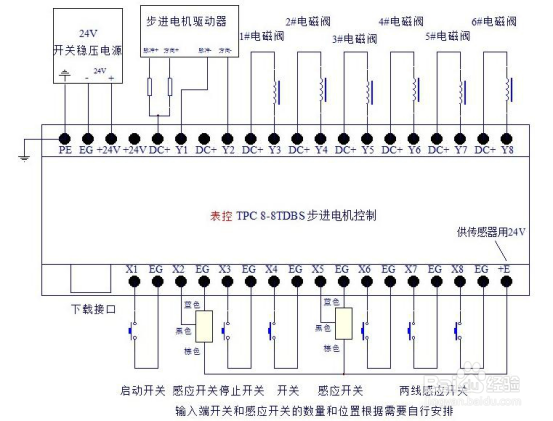
图中输出端 Y3——Y8 用来控制气缸的电磁阀,控制气缸很简单,动作控制都可以实现,下面主要介绍一下步进电机的控制方法:
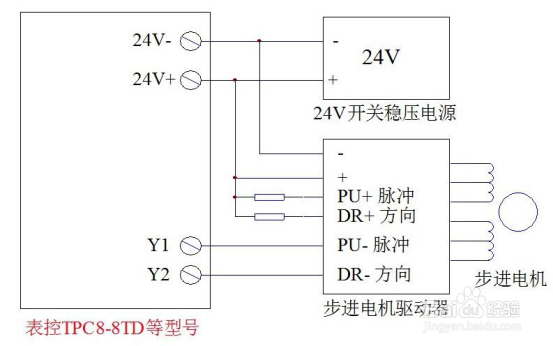
Y1 和 Y2 控制步进电机,Y1 作为脉冲输出端,Y2 作为方向控制端。控制器与步进电机驱动器的接线参见下图:图中示出控制器的脉冲输出端 Y1 和方向控制端 Y2 与步进电机驱动器的接线原理。
脉冲输出端 Y1 连接步进电机驱动器的 PU 端,方向控制端 Y2 连接 DR 端。步进电机驱动器必须设置为脉冲+方向的方式,PU 端为脉冲输入端,DR 端为方向输入端。
控制器的地线 EG 与驱动器的电源负极-V 相连,控制器的供电为 24V,步进电机驱动器及步进电机的电源则根据不同厂家及型号、遵照其说明书要求连接所需的电源。
图中所示的接线方法是控制器与驱动器输入端的高端共用一个 24V 电源的接法(有的驱动器输入端的电源为 5V,需要有个单独的 5V 来供电),共用 24V
的接线方法可以节省一个电源,但是电源到驱动器的输入高端需串联 1K——2K
的电阻。
具体接线如图所示:步进电机驱动器脉冲和方向输入信号的高端为公用端,与控制器的 24V 共用一个电源,在电源与信号的高端之间必须串联两支限流电阻。
控制器的接线参见下图:
2、功能设置
2气缸与步进电机混合控制的实现方法
工作模式的设置:
工作模式项是设置程序行的工作模式的选项,根据具体设置功能的需要来
选择设置,工作模式选项包括“蜂鸣”、“脉冲”、“时钟”、“计数”、“全停”、
“暂停”及单步 7 种模式选项。需要设置时在所需要的程序行选择相应的工作
模式,不同的工作模式当前设置行的相关选项会以不同的颜色来显示。参见下
图工作模式(红圈部分):图中选择脉冲工作模式,相应的频率、和脉冲个数变
为绿色,表头上显示脉冲个数单位。

3、脉冲输出的设置:
各种型号的表格程序控制器(板)至少具有 1 路脉冲输出,可用于输出脉
冲信号给步进电机驱动器,用来控制步进电机的运行。脉冲输出控制步进电机
采用脉冲+方向控制方式,步进电机驱动器也要设置为脉冲+方向模式。
设置脉冲工作的程序行的工作模式必须选择“脉冲”选项才能具有脉冲输出功能,1 路脉冲输出的控制器默认使用 Y1 作为脉冲输出端控制一个步进电机,2 路脉冲输出的控制器默认使用 Y1 和 Y2 作为 2 个脉冲输出端控制两个步进电机,方向控制可以使用任意一个输出端作为方向控制端,方向控制端有无输出代表不同方向。不使用脉冲输出功能的时候 Y1 和 Y2 可作为通用的输出端使用,用于驱动电磁阀、继电器等其他电器负载。
两路脉冲输出的控制器默认 Y1 和 Y2 为脉冲输出端,脉冲输出端接步进电机驱动器的 PU 端,方向控制端接驱动器的 DR 端。
注意: 控制器的脉冲输出控制端和方向输出端是 NPN 晶体管输出,如果步进电机驱动器输入高端为 5V 时可以直接连接驱动器输入端的低端,如果步进电机驱动器的输入高端为 24V 时,需要在控制器的输出端与驱动器输入端之间分别串联 2K 的电阻,以防止电流过大烧毁驱动器。
脉冲频率设置:
输出频率的设置用于脉冲输出频率的设置,脉冲输出时固定由输出端 Y1
输出,输出设定频率的脉冲系列,脉冲频率的设定范围为 100 赫兹——15000
赫兹,超过范围则不能正常工作,供步进电机或伺服电机等外部设备工作。
单轴脉冲输出的设置示例:单轴步进控制采用启动和停止 Y2 输出状态来改变电机运行的方向。下图是频率设置的示例。

4、图中,第 2 行工作模式设置为“脉冲”模式,光标在脉冲模式的第 2 行
时,脉冲频率项及脉冲个数输入项分别显示脉冲个数的单位,数据输入框显示为绿色。脉冲输出单位为:百万、十万、万、千、百、十、个,脉冲频率的单位为赫兹。示例中频率设置为 500 赫兹,脉冲个数为 1101616 个脉冲(一百一十万一千六百一十六)。
本例中设置在第 1、2 行由 X1 同时启动 Y1 和 Y2,用 X2 停止 Y2 的输出以此来控制步进电机的转动方向。由于 Y2 只负责方向控制,电机的运行主要依靠脉冲的有无来决定,因此 Y2 设置了较长的定时时间 1 小时,当 Y1 输出到达设定的脉冲个数时,Y1 停止脉冲输出,步进电机停止运行。
简单的加减速控制:如果需要加减速控制可以采用在多行设置不同频率分段设置各行的频率及脉冲个数来实现。例如:加减速启动,可由三行程序实现,第一行设置启动速度的频率,第二行设置加速的频率,第三行设置工作速度的频率,各行分别设置脉冲个数,如此组成加减速控制的启动设置,每行设置的频率和脉冲数据作为该段的数据。加减速停止功能的设置原理与此相同,只是设置的是减速停止,只是变加速设置为减速设置。设置加减速控制的时候需要注意:总的运行脉冲数中包括加速段和减速段的脉冲数,加减速的脉冲数包含在总脉冲数中,计算的时候注意要将其从总脉冲中减去。
二、两轴步进电机与气缸的混合控制
两轴步进电机与气缸的混合控制与单轴混合控制的原理相同,只是两轴步
进电机需要 Y1——Y4 四个输出端来控制,剩余的输出端可以用于气缸电磁阀的
4
气缸与步进电机混合控制的实现方法
控制。电磁阀的控制与单轴的类同,这里主要介绍一下两轴步进电机的控制。
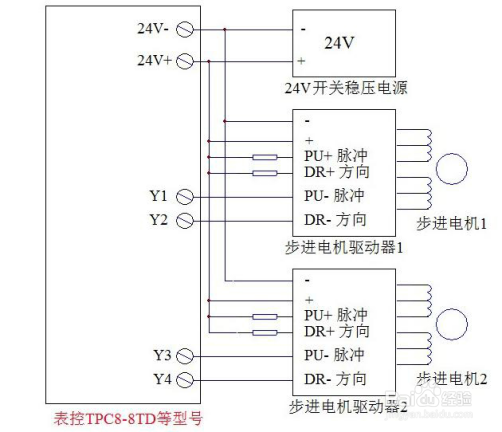
两轴步进电机的控制,每轴分别需要一个脉冲输出端和一个方向输出端给步进电机驱动器信号,这里使用 Y1 和 Y2 作为两轴的脉冲输出端,使用 Y3 和 Y4 作为两轴的方向控制端,Y1 和 Y3 控制一轴步进电机,Y2 和 Y4 控制另一轴步进电机。功能的设置参见下图:

5、图中,设置 Y1 转速为 8000 赫兹的脉冲,输出脉冲为 10000,设置 Y2 转
速为 5000 赫兹的脉冲,输出脉冲为 10000,设置 Y3 和 Y4 分别为两轴的方向控制端。4 行程序都由 X1 输入端来启动,改变 Y3 和 Y4 的输出状态可以改变电机的旋转方向。
两轴步进控制与单轴控制原理相同,接线参见下图: