怎样实现简单的SolidWorks棘轮棘爪运动仿真
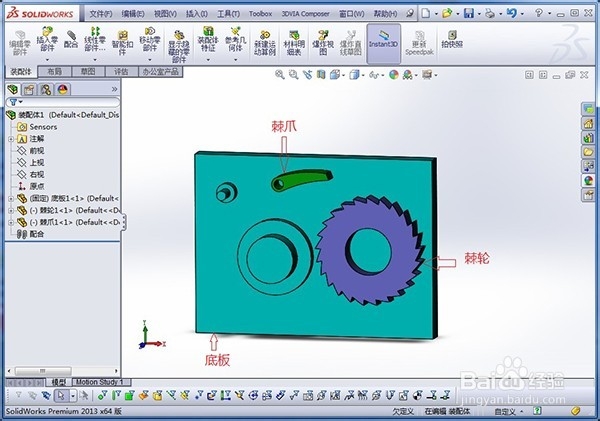
1、零件准备,如下图所示,主要有底板、棘轮和棘爪,底板用于确定棘轮和棘爪的相对位置。
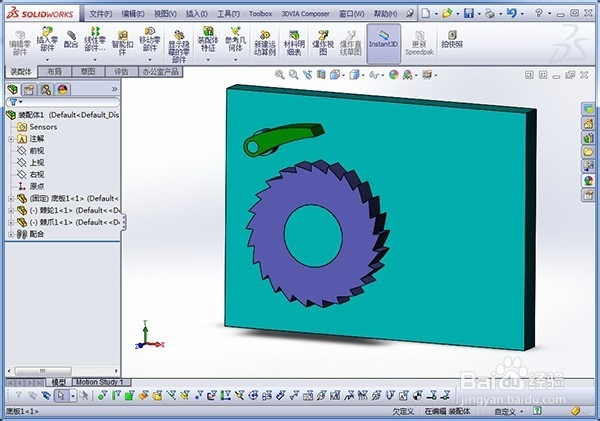
2、将底板作为固定件,把棘轮和棘爪分别安装在底板的相应位置,同时保持二者的旋转自由度。装配效果如下图所示:
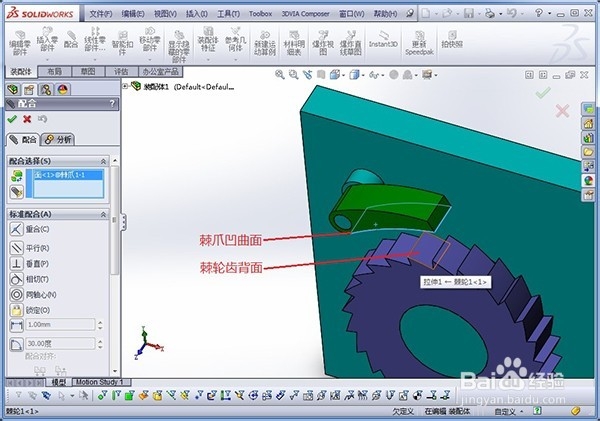
3、如下图所示,选择棘爪凹曲面和棘轮齿背面作为要配合的实体,系统自动将二者的配合关系选择为“同心”。这一步保证棘轮棘爪之间有个合适的初始相对位置。此时所有零件都处于完全定位状态。
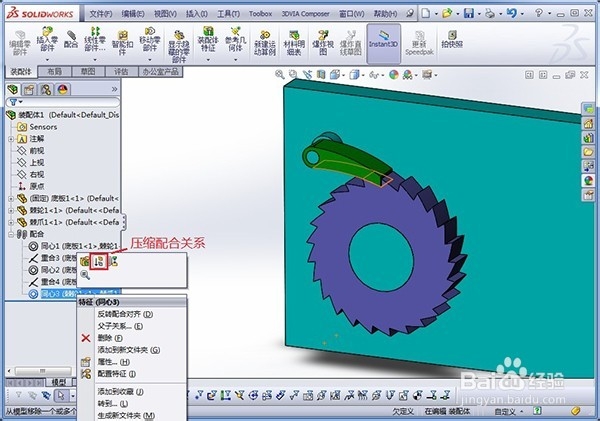
4、如下图所示,将第三步设置的配合关系压缩,释放棘轮和棘爪的旋转自由度,为运动仿真做准备。
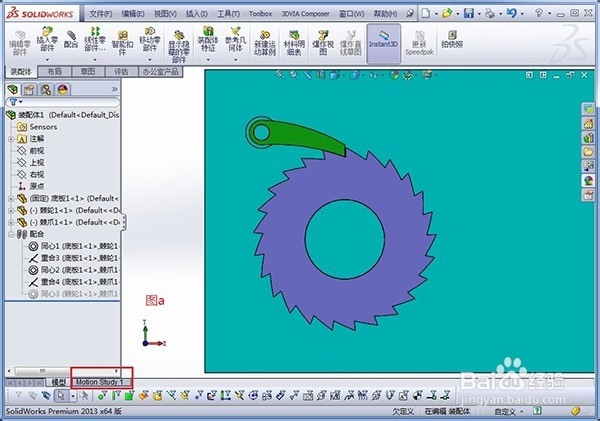
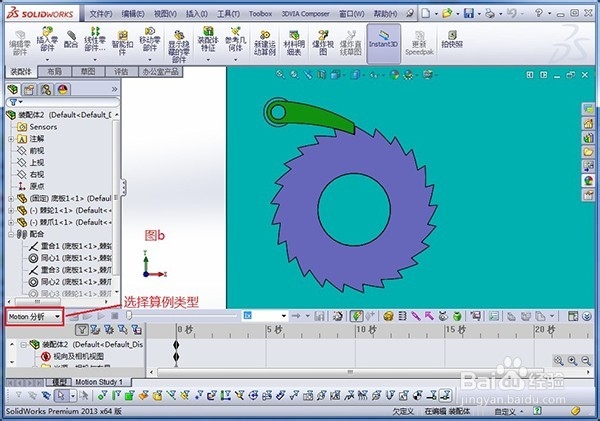
1、在已经开启SolidWorks Motion插件的情况下,如下图a所示点击“Motion Study1”。在“算例类型”一栏选择“Motion分析”,如下图b所示:
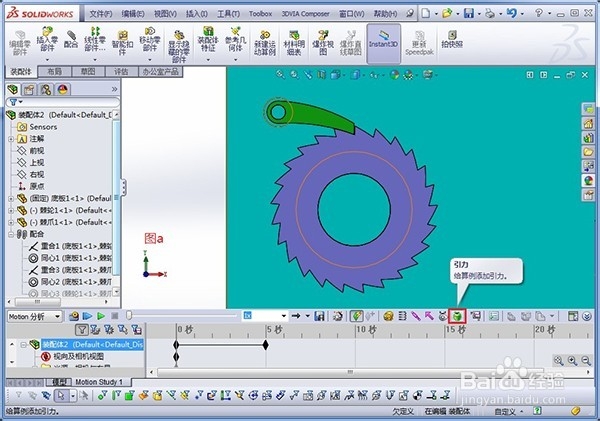
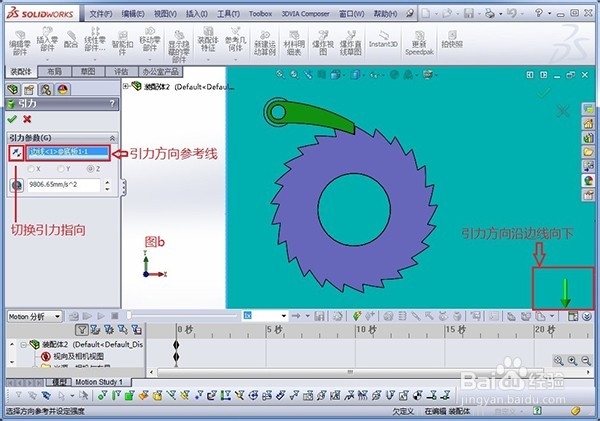
2、点击如下图a所示的青苹果图标,为装配环境添加引力;如下图b所示,将底板的一条竖直边线设置成引力方向的参考线,将引力方向切换到竖直向下。
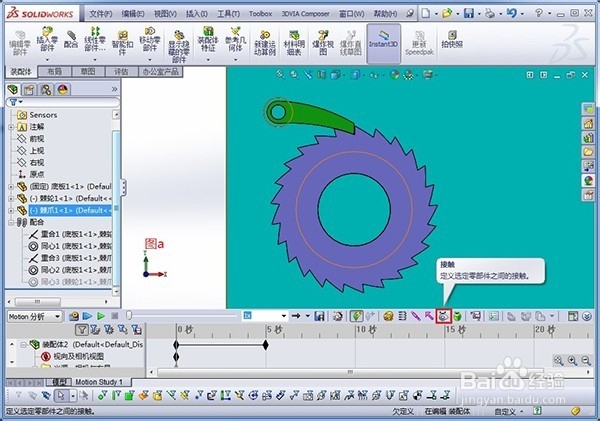
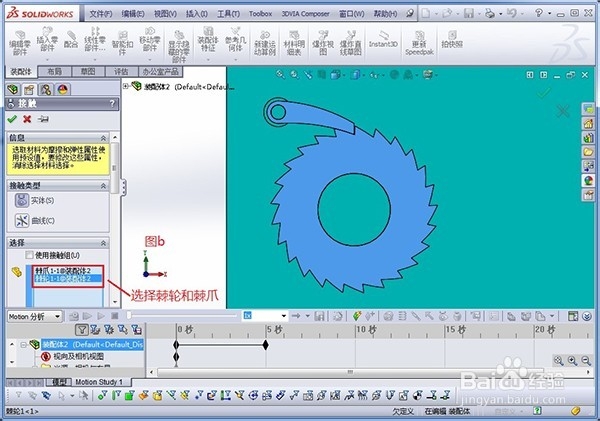
3、点击如下图a所示的凸轮图标,在棘轮与棘爪之间设置接触关系;如下图b所示,选中棘轮和棘爪,点击确定即可。
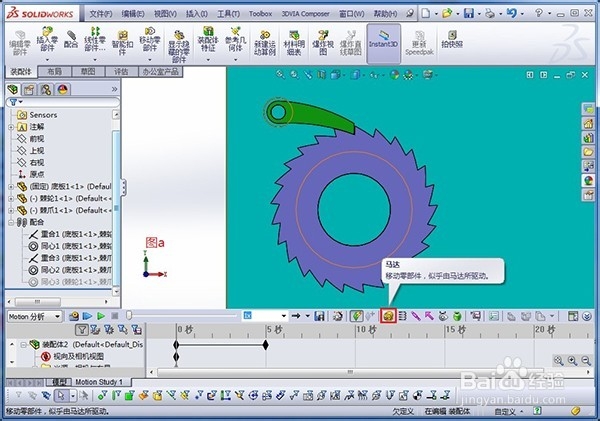
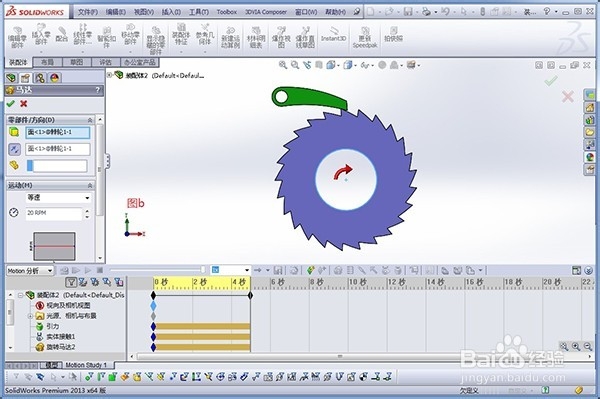
4、点击如下图a所示的电机图标,在棘轮上放置一个旋转马达;如下图b所示,旋转马达放置在棘轮上并且按顺时针方向旋转,转速最好设置得小一点。
5、将底板隐藏,方便观察棘轮与棘爪的相对运动,然后替换“视向及相机位置”的初始键码,以让系统记住底板的隐藏操作。
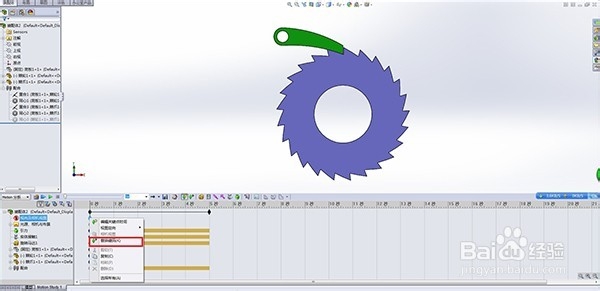
6、点击如下图中的“计算”,在运动算例计算完后,就可以播放仿真动画了。
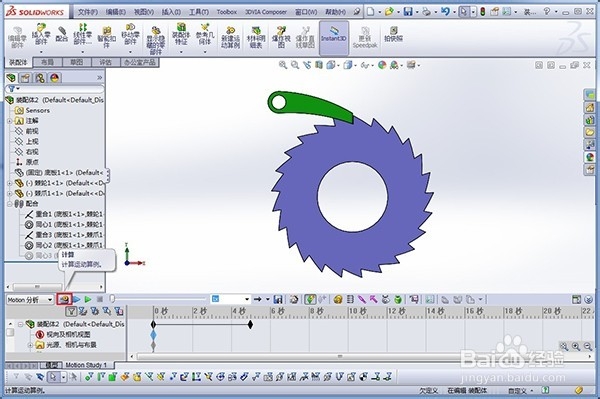
7、简化的solidworks棘轮棘爪运动仿真效果如下:
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:24
阅读量:106
阅读量:115
阅读量:25
阅读量:78