乐高EV3 PID巡线
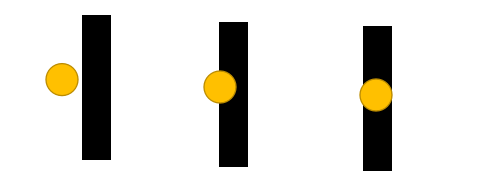
1、在我们开始程序之前,我们首先了解如下项目:1.PID的意义:P-比例(proportion的首字母)I-积分(integral的首字母)D幻腾寂埒-导数(derivative的首字母)2.单光巡线原理黄色圆形代表传感器位置,黑色代表我们要巡的线。假设在左侧情况下反光值为50,右侧反光值为10,那么中间的反光值就大约等于30.如果传感器检测到反光值大于30,车体左偏,需要向右转;如果传感器检测到反光值小于30,车体右偏,需要向左转;如果传感器检测到反射光值等于30,直行。
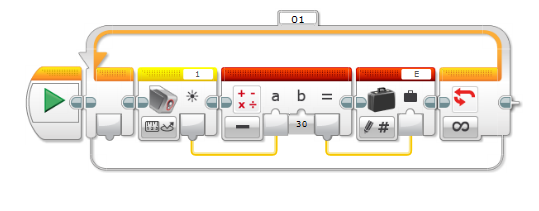
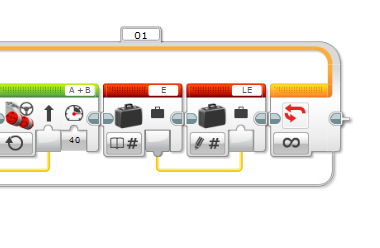
5、用另外一个线程先做出E此处颜色传感器检测反射光强度,与30做差,算出误差值
7、继续做出D此处用本次误差-上次误差赋值给D
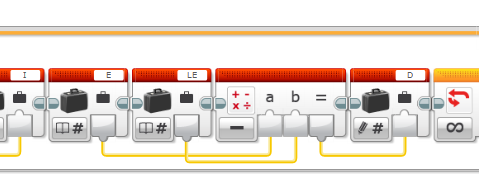
9、接下来我们把E赋值给LE
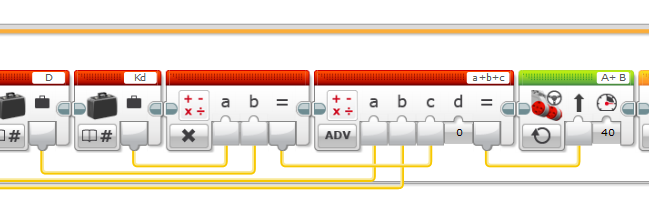
10、至此,我们PID的巡线程序就都完成了,剩下的工作就是仔细调整Kp,Ki,Kd的值,使小车达到理想的巡线状态了
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:90
阅读量:50
阅读量:90
阅读量:36
阅读量:76