Pro/Mechanism机构运动仿真初步
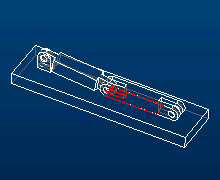
1、建立一新的组装档,
· 将platform.prt以内定的位置组进组装文件
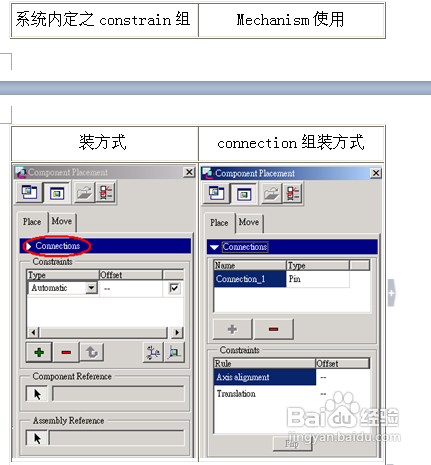
· 组装arm1,组装方式藉由点选Connections改成以connection方式组装(Axis alignment部分以arm1之A_1轴对应platform
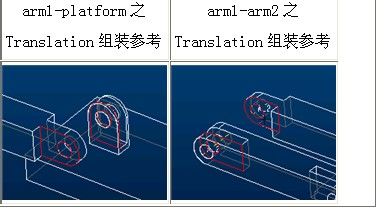
之A_1轴,Translation部分参考下图对应),组装过程中可使用Ctrl+Alt+鼠标右键动态拖曳调整
2、· 组装arm2,组装方式与arm1相同(Axis alignment部分以arm2之A_2轴对应arm1之A_2轴,Translation部分参考下图对应)
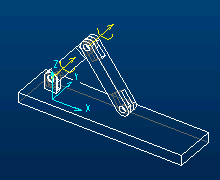
3、· 组装完成后点选Mechanism进入Mechanism环境
点选Drag,以鼠标左键点取arm1或arm2上任意位置,保持按住并拖曳调整成如下图的位置
4、由于我们尚未告诉系统arm2与platform之间的connection配合关系此时我们必须将此条件加入
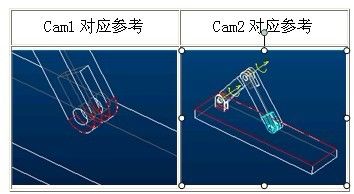
· 选取Model选项中的Cams设定arm2与platform之间的connection为Cams配合,对应参考如下图,
至于Front Reference选PNT0,Back Reference则选PNT1,此时我们已完成本机构所需的connection设定
· 使用Drag的功能再次拖曳,注意现在机构的运动方式与未加入Cams设定前有何不同
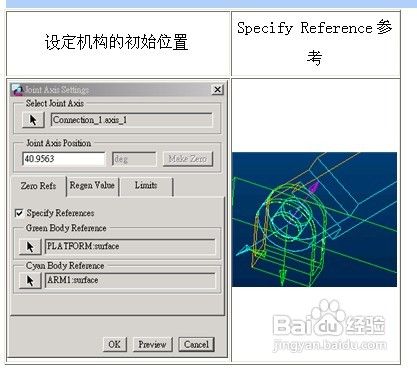
5、接下来开始设定此机构的初始位置一般而言,若我们不设定机构的初始位置,Mechanism会以屏幕上目前的位置作为初始位置
6、· 选取Model Jt Axis Settings,选取arm1与platform之间的Pin connection,勾选Specify Reference并选取如下右图中的橘色面作为 参考
· 切换至Regen Value画面,勾选Specify Regeneration Value,输入45,作为将来regenerate之角度
此时可试着设定不同的角度值并使用下方的Preview键,观察不同角度的变化
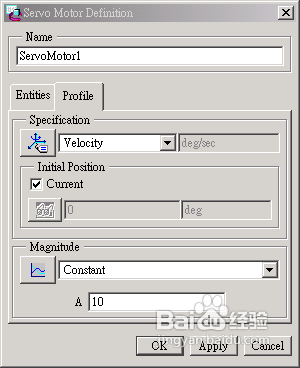
7、要让机构产生动作我们必须加入动力条件,此时选择加上伺服马达动力条件
· 选取Servo Motors,选取arm1与platform之间的Pin connection,切换到Profile画面将Specification改成Velocity,
设定A值为10,如下图.
此时可更改A为任意值,并点选下方的键,观察速度随着时间的数值变化
8、当本练习所需要的条件设定完后,屏幕上看到的画面应如下图所示
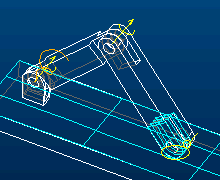
9