RobotArt中环境校准方法(3)-工件坐标系
1、上两期我们已经介绍了两种校准工件的方法,接下来我们看第三种,工件校准的方法,通过工件坐标系校准工件位置
建立新的工件坐标系,在新建立的工件坐标系的右键菜单编辑命令输入真实的工件坐标系的值,实现工件坐标系校准工件位置
首先建立新的坐标系
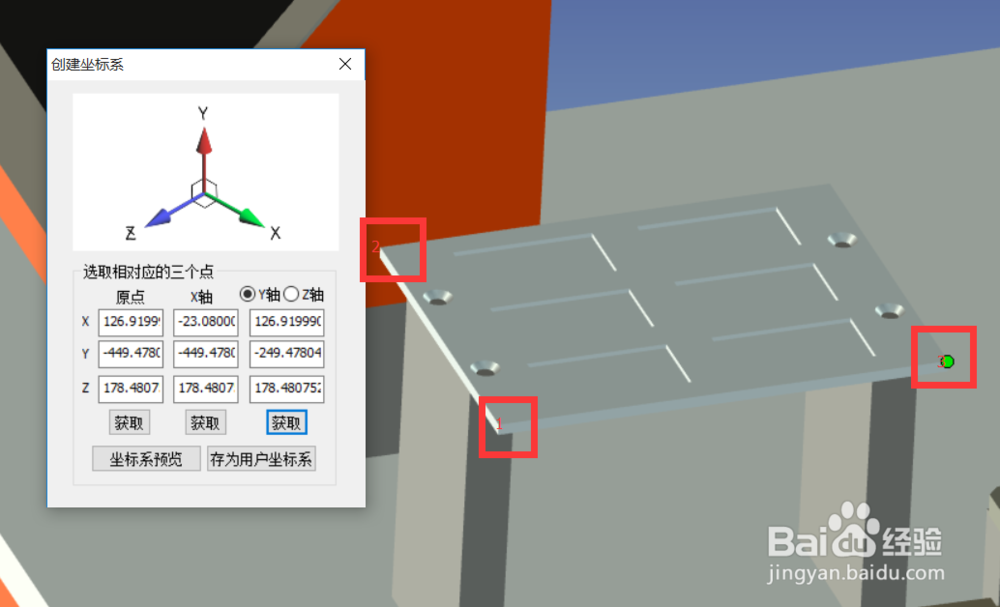
2、在工件上选取三个点,新建一个坐标系
3、点击确定之后,我们已经建立了一个工件坐标系,在机器人加工管理面板中可以看到,如图所示
4、在新建立的工件坐标系的右键菜单编辑命令中输入真好是的工件坐标系的值,则工件的位置在模拟环境中与真实的一致,以一个测量好的工作台为例,如图所示
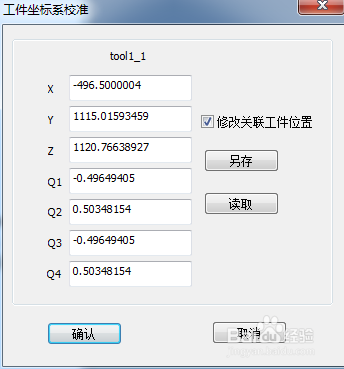
5、填入数值之后,点击确认,即可完成位置的校准
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。