利用KM动平衡仪固定质量块的方法
1、随着当前精密数控加工技术的发展,高速转子在加工生产过程中产生的严重影响其加工精度的动平衡问题显得尤为重要,动平衡校正前计算好试重信息,三个质量块质量分别默认为单位 1,如下图指示 在仪器“计算器”功能里分两步计算:
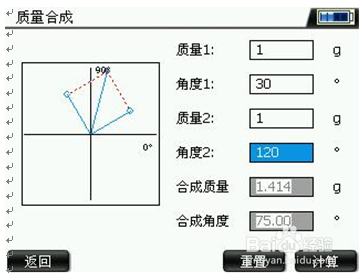
2、动平衡仪可以有效地保障设备运行的可靠性与安全性,能取得良好的经济效益和社会效益,具有重大的实际意义,设备分别添加三个质量块在 0°、120°、240°,旋转设备,测量初始振动。
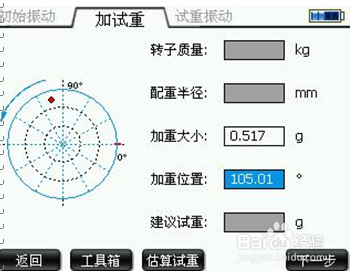
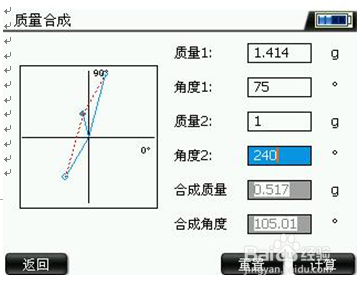
3、转子不平衡是旋转机械中的常见问题,也是诱发转子系统故障的主要原因之一。因此,开展动平衡技术研究具有重要的学术和工程应用价值,停机将 0°质量块移至 30°,120°、240°两个质量块角度保持不变,将上图计算结 果:质量 0.517g,角度 105.01°输入仪器试重信息栏里面即可。如下图所示:

4、启动设备,按照动平衡正常步骤测量试重后的振动信息,例如仪器计算校正结果如下:
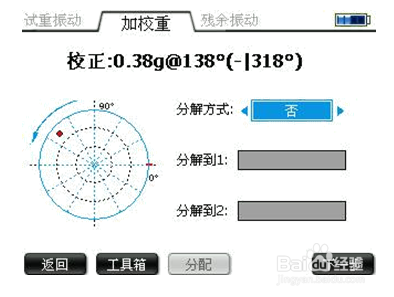
5、现场平衡概念和必要性常用机械中包含着大量的作旋转运动的零部件,例如各种传动轴、主轴、电动机和汽轮机的转子等,统称为回转体。对 0.38g 和 138°进行角度分解,仪器分解方式选择:到固定质量,分解到 1、2:两栏 分别输入单位 1,点击仪器按钮“分配”进行计算。如下图所示:
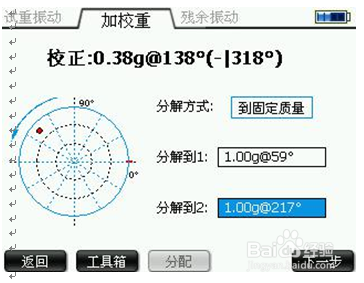
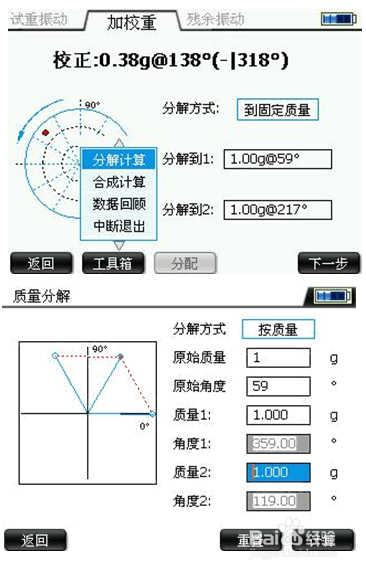
6、其次我们用计算结果为质量块一放置角度 59°,质量块二放置角度 217°,但实际设备是有三 个质量块存在,所以还需要继续分解一次,如下图所示首先选择“工具箱”功能,其次选择 “分解计算”,对质量块一进行再次分解计算。按照最终计算结果,三质量块分别放置角度 为:359°、119°、217°。
7、完成以上步骤以后按照计算结果添加质量块完成后,启动设备测量残余振动量,如需要继续校正,可按照 上一步到固定质量分解计算运用即可。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:175
阅读量:28
阅读量:125
阅读量:108
阅读量:64