UG10.0练习三维建模五百四十五之手轮
1、如下图所示,
打开UG10.0软件,新建一空白的模型文件,
另存为:UG10.0练习三维建模五百四十五
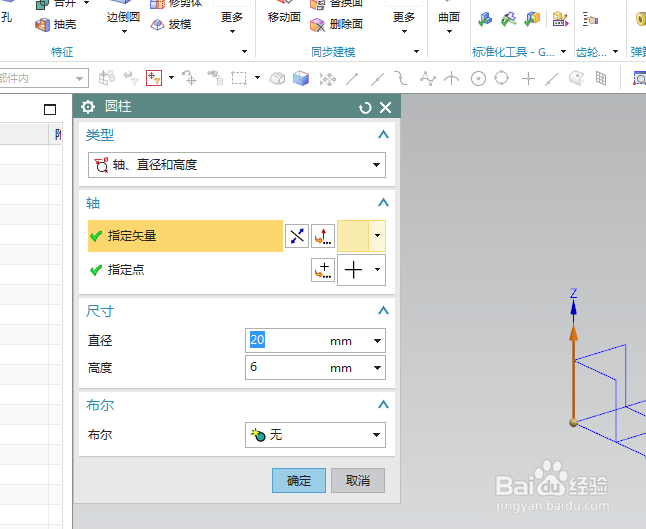
2、如下图所示,
执行【】菜单——插入——设计特征——圆柱体【】,
指定矢量Z轴,指定点:坐标原点,
设置尺寸:直径20,高度6,
点击应用。
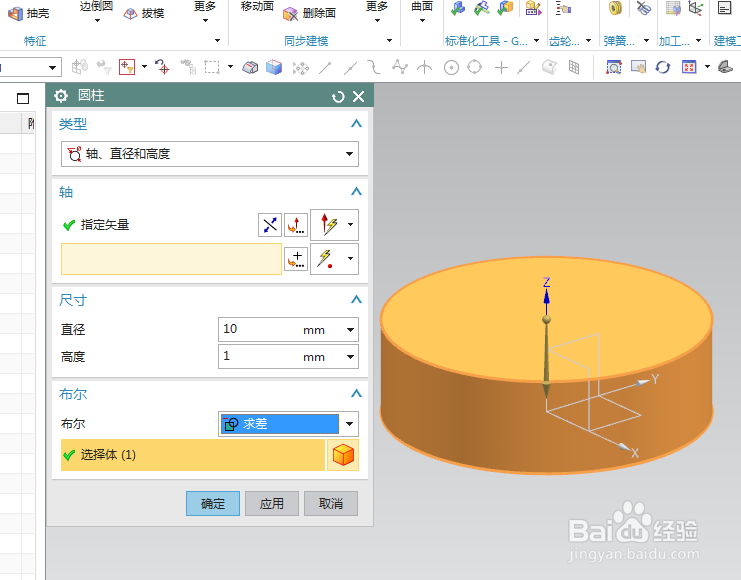
3、如下图所示,
指定矢量Z轴,反向,
指定点:上端面圆心点,
设置尺寸:直径10,高度1,
布尔求差,点击确定。
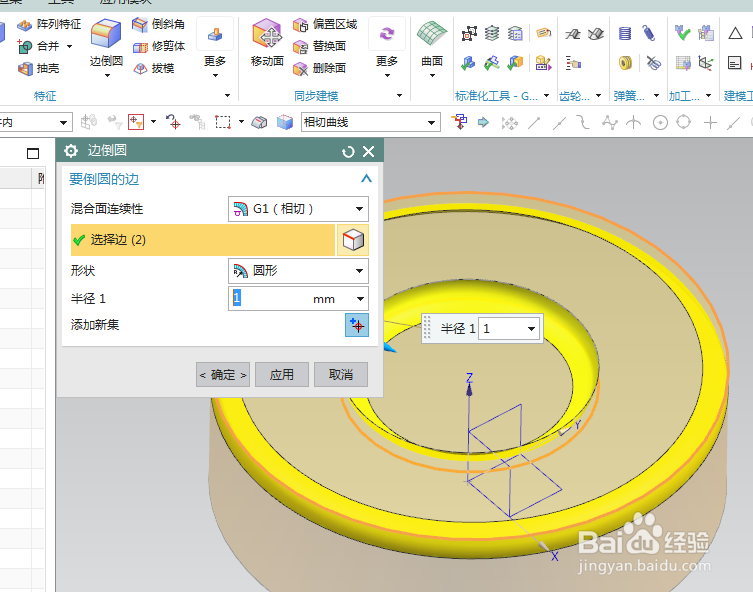
4、如下图所示,
点击工具栏中的边倒圆命令,
选择下图中的两条实体边线,设置半径为R1,
点击应用。
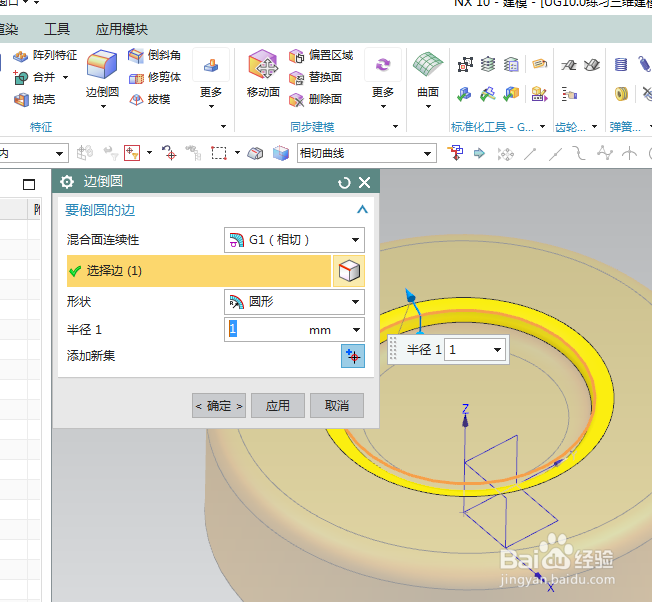
5、如下图所示,
选中下图所示的另一条实体边线,
设置半径为R1,
点击确定。
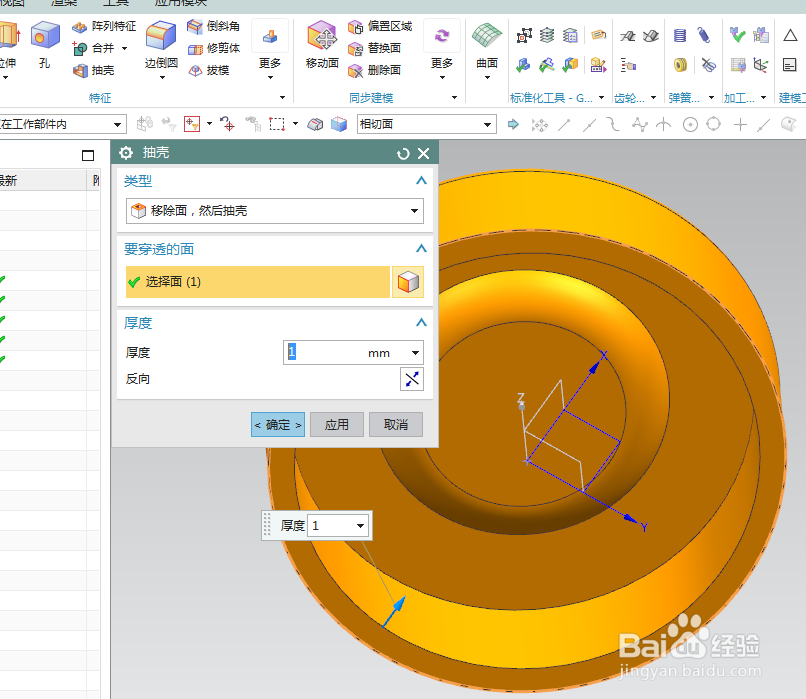
6、如下图所示,
点击工具栏中的抽壳命令,
选中底面,设置厚度为1,
点击确定。
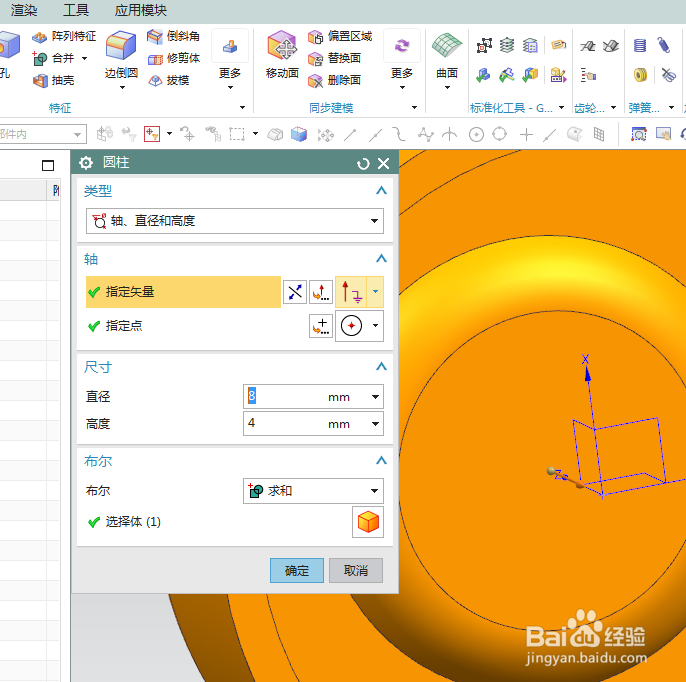
7、如下图所示,
执行【】菜单——插入——设计特征——圆柱体【】,
指定矢量Z轴,调整方向,指定点:内孔底面圆心点,
设置尺寸:直径8,高度4,
布尔求和,
点击应用。
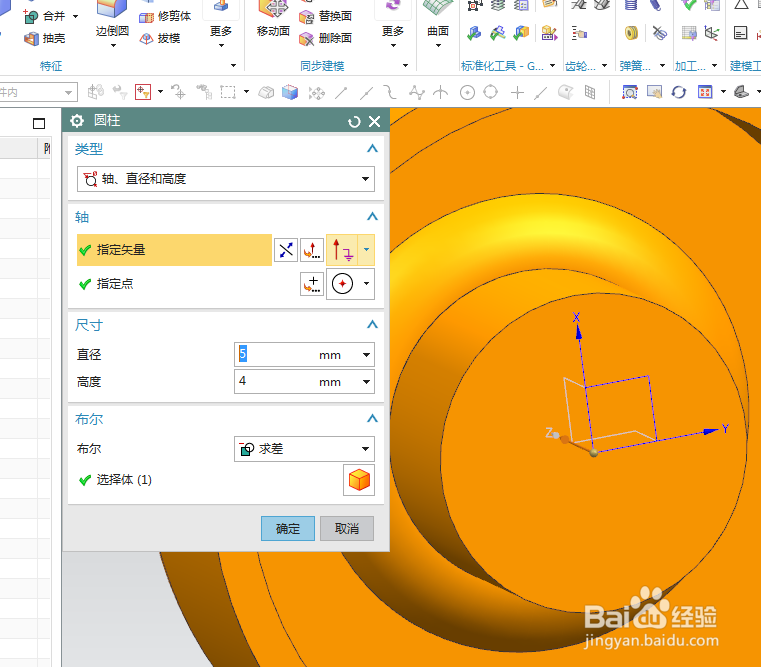
8、如下图所示,
指定矢量Z轴,指定点:端面圆心点,
设置尺寸:直径5,高度4,布尔求差,
点击确定。
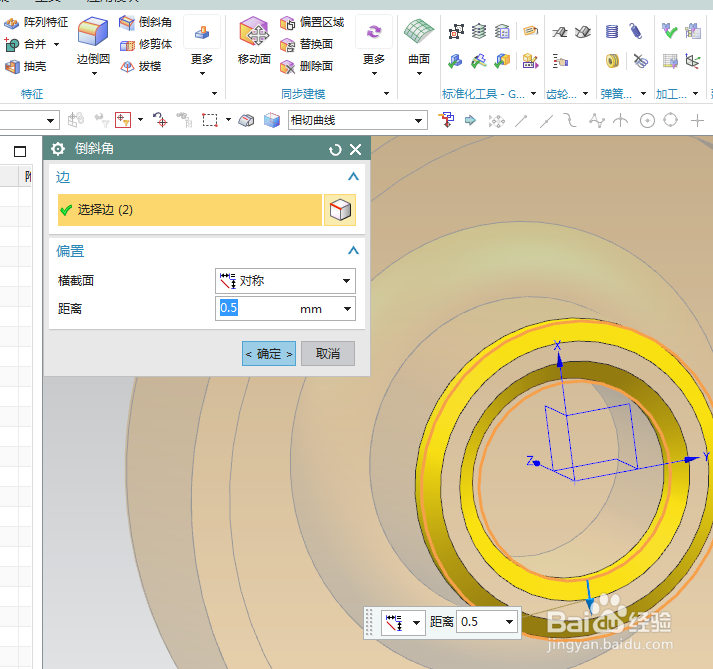
9、如下图所示,
点击工具栏中的倒斜角命令,
选中两条实体圆形边线,
设置横截面对称距离为0.5,
点击确定。
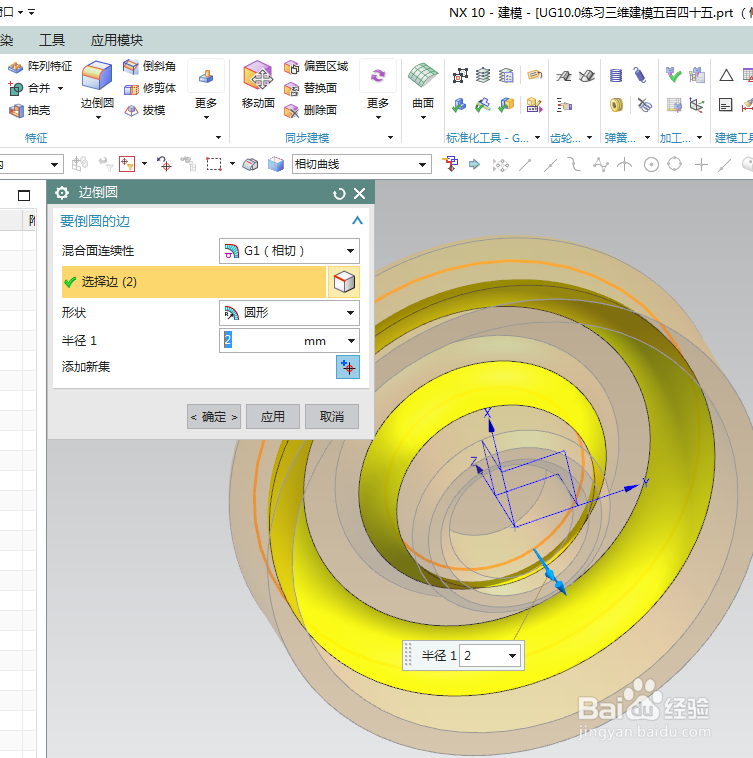
10、如下图所示,
点击工具栏中的边倒圆命令,
选择下图中的两条实体边线,设置半径为R2,
点击应用。
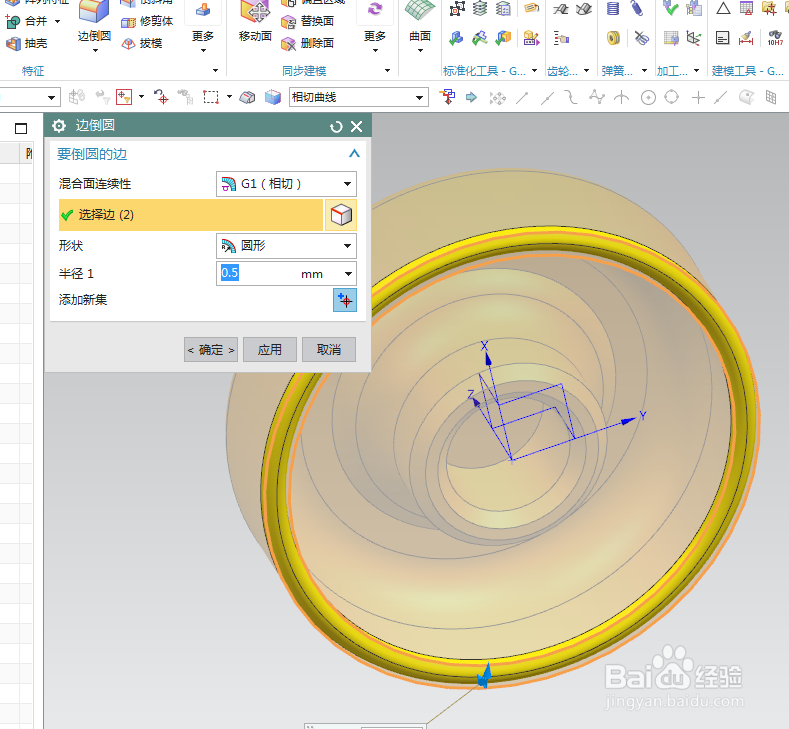
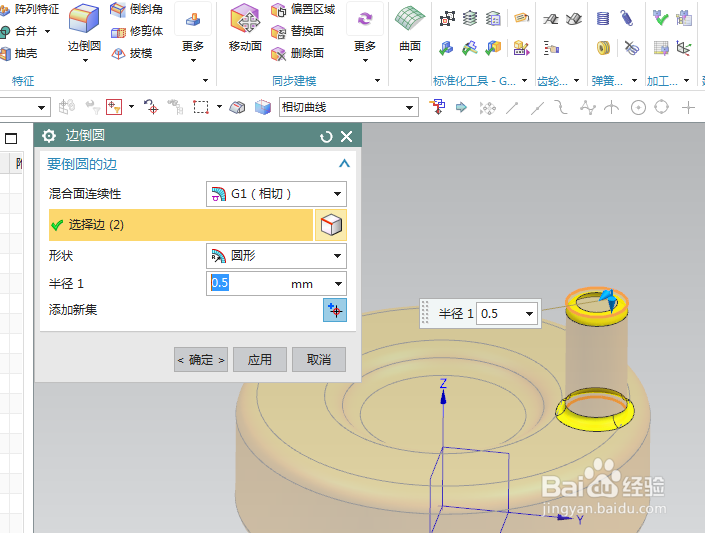
11、如下图所示,
选择下图中的另外两条实体边线,设置半径为R0.5,
点击确定。
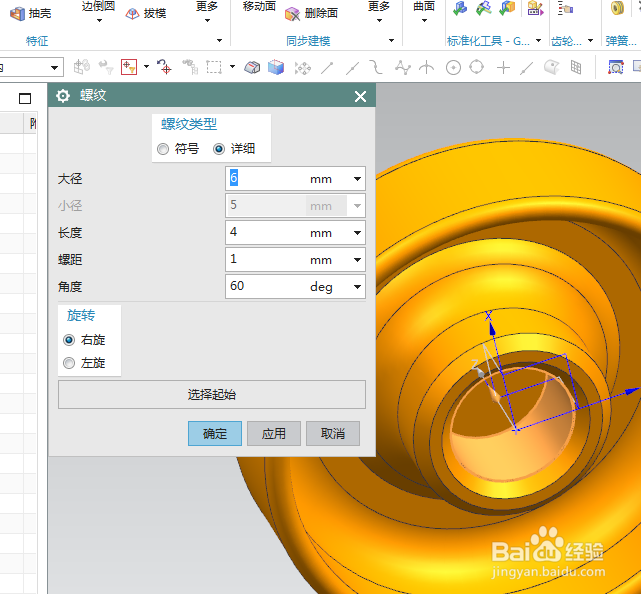
12、如下图所示,
点击工具栏中的【更多——螺纹】,
选择内孔侧面,选中螺纹起始面。
参数默认,
点击确定,。
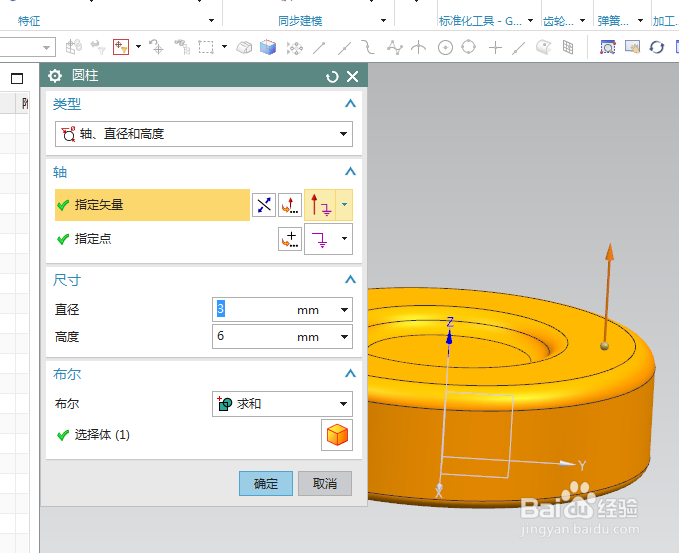
13、如下图所示,
执行【】菜单——插入——设计特征——圆柱体【】,
指定矢量Z轴,指定点:X坐标是0,Y坐标是7.5,Z坐标是6,
设置尺寸:直径,3,高度6,
布尔求和,点击确定。
14、如下图所示,
点击工具栏中的边倒圆命令,
选择下图中的两条实体边线,设置半径为R0.5,
点击确定。
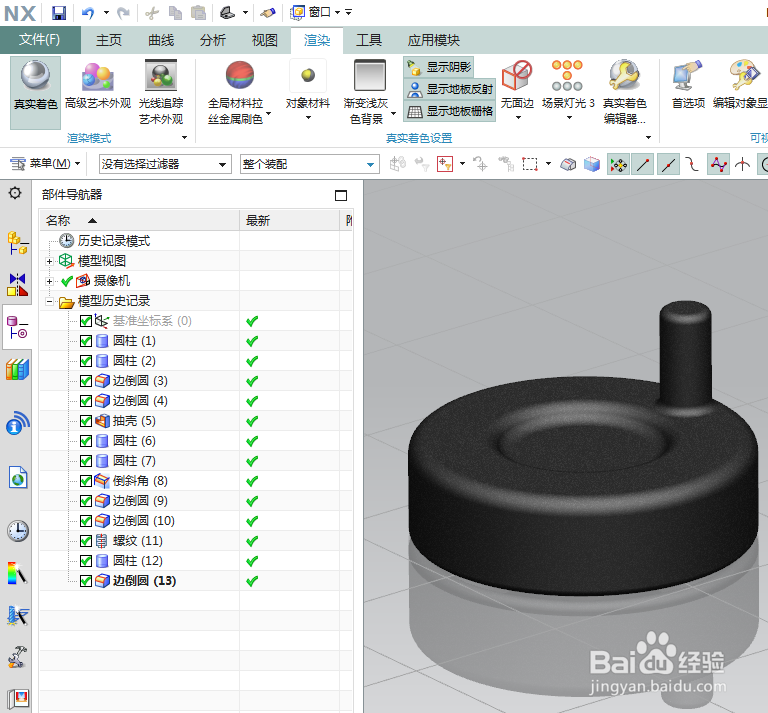
15、如下图所示,
隐藏基准坐标系,显示设置为着色,
渲染——真实着色——选中实体——对象材料——深灰色纹理。
————至此,
这个手轮建模并渲染完成了,
本次练习结束。