如何进行激光雷达扫描匹配?
1、%使用lidarScan创建一个参考激光雷达扫描。指定范围和角度为向量。
命令行键入:
refRanges = 5*ones(1,300);
refAngles = linspace(-pi/2,pi/2,300);
refScan = lidarScan(refRanges,refAngles);

2、%使用transformScan函数,在x,y偏移量(0.5,0.2)处生成第二次激光雷达扫描。
命令行键入:
currScan = transformScan(refScan,[0.5 0.2 0]);

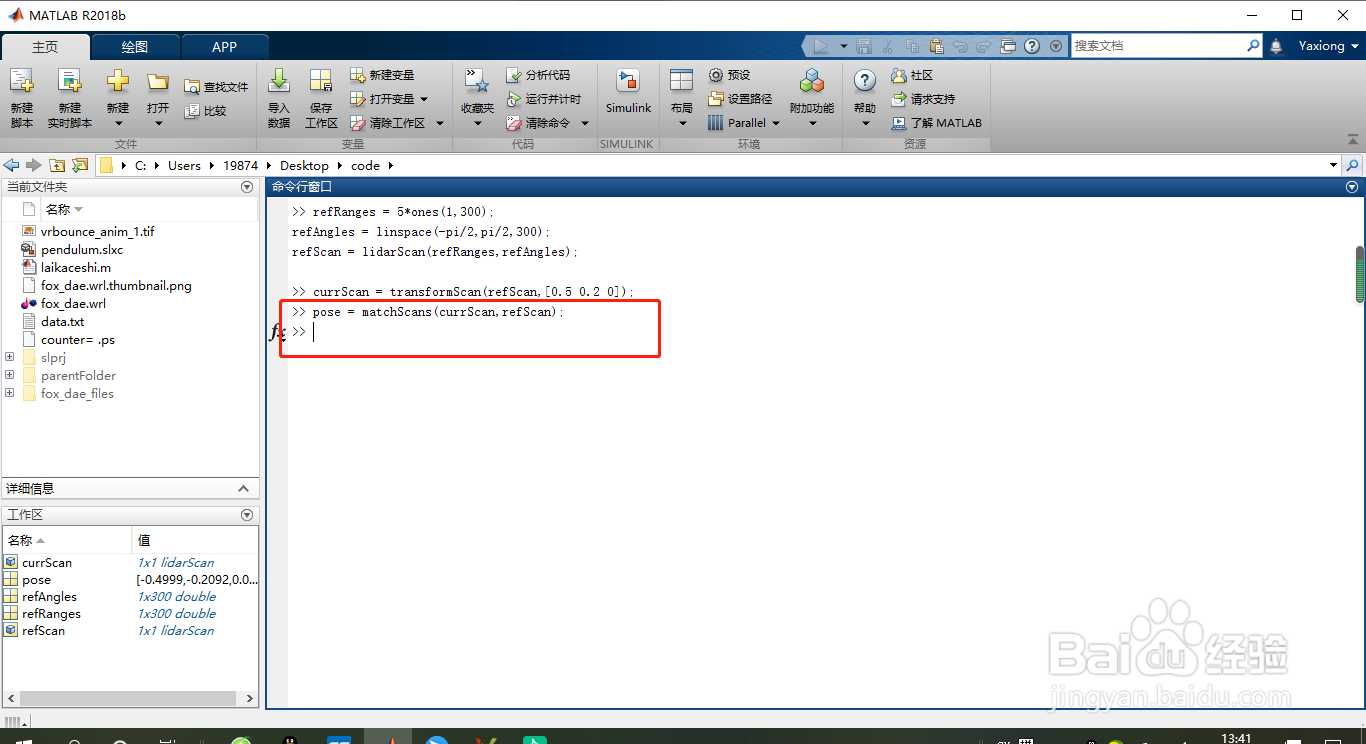
3、%匹配参考扫描和第二次扫描,估计两者之间的位姿差异。
命令行键入:
pose = matchScans(currScan,refScan);
4、%使用transformScan函数通过使用相对位姿差将第二次扫描转换为第一次扫描的帧来对齐扫描。
命令行键入:
currScan2 = transformScan(currScan,pose);

5、%绘制原始扫描和对齐扫描。
命令行键入:
subplot(2,1,1);
hold on
plot(currScan)
plot(refScan)
title('Original Scans')
hold off
subplot(2,1,2);
hold on
plot(currScan2)
plot(refScan)
title('Aligned Scans')
xlim([0 5])
hold off

6、清除窗口。
命令行键入:
clc。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。