使用串行端口控制引脚
1、函数:getpinstatus
目的:获取串行pin状态。

2、函数:setRTS
目的:指定RTS管脚的状态。

3、函数:setDTR
目的:指定DTR管脚的状态。

4、函数:FlowControl
目的:指定要使用的数据流控制方法。

5、连接到仪器-调制解调器通电后,为第一个调制解调器创建串行端口对象s1,为第二个调制解调器创建串行端口对象s2。二者都调制解调器配置为每秒9600位的波特率。

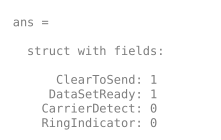
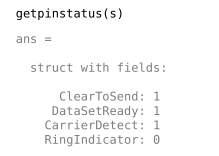
6、通过使用getpinstatus函数检查数据集ready pin的值,可以验证调制解调器(数据集)是否准备好与计算机通信。

7、配置属性-两个调制解调器都是使用configureminator函数为回车(CR)终止符配置的。

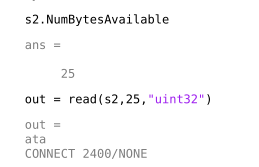
8、写入和读取数据-使用writeline函数将atd命令写入第一个调制解调器。此命令使调制解调器“脱离挂钩”,相当于手动提升电话接收器。


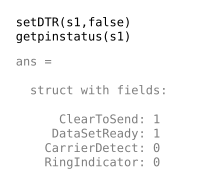
9、现在使用setDTR函数断开两个调制解调器之间的连接。通过使用getpinstatus函数检查载波检测管脚值,可以验证调制解调器是否已断开连接。
10、断开连接并清理-完成后从MATLAB工作区清除对象。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:137
阅读量:136
阅读量:79
阅读量:101
阅读量:164