足球骨骼绑定
1、1:在网上下载一个足球模型或自己做一个;
如图所示:

2、2:创建一节骨骼;
如图所示:

3、3:创建4个控制器,命名;
(1)将控制器吸附在需要位置;
(2)将创建的控制器都“冻结变换”和删除历史;
如图所示:


4、4:选足球模型组zuqiu_grp,使用“晶格”(在“动画模块——创建变形器”);
如图所示:

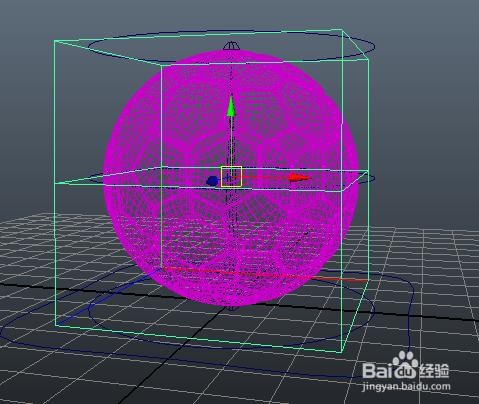
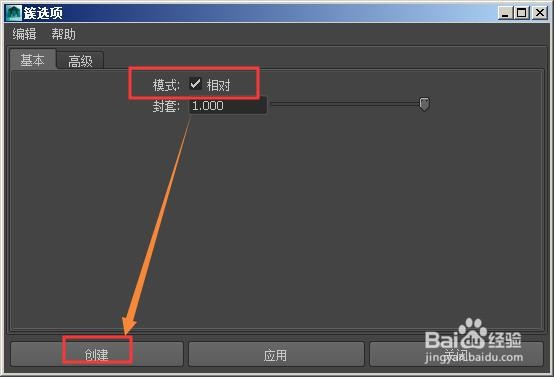
5、5:选创建的晶格ffd1Lattice,鼠标右键点击“晶格点”,使用“簇”工具(在“动画模块——创建变形器”)创建簇;
(1)选中间的4个晶格点;
如图所示:

6、6:打开“连接编辑器”:选控制器mid_crv和簇:cluster1Handle;
(1)控制器mid_crv的translate连接簇:cluster1Handle的translate;
如图所示:

7、7:选根骨骼joint1和晶格ffd1Lattice,进行“平滑蒙皮”(在“动画模块——蒙皮——绑定蒙皮”);
如图所示:

8、8:使用“IK控制柄工具”创建IK;
(1)点击骨骼joint1和骨骼joint2;
如图所示:


9、9:“点”约束:选控制器up_crv和IK:ikhandle1;
如图所示:

10、10:选骨骼joint1和控制器down_crv;
(1)按“P”键,骨骼joint1成为控制器down_crv的子物体;
如图所示:

11、11:“目标”约束:
(1)选控制器up_crv和控制器down_crv;
(2)选控制器down_crv和控制器up_crv;
如图所示:

12、12:选控制器mid_crv和簇cluster1Handle,打组,命名为mid_crv_grp;
(1)按“P”键,将组mid_crv_grp成为骨骼joint1的子物体;
如图所示:

13、13:使用“距离工具”工具(在“创建——测量工具”);
(1)按“V”键,定位器locator1吸附在骨骼joint2;
(2)按“V”键,定位器locator2吸附在骨骼joint1;
(3)按“p”键,定位器locator1成为控制器up_crv的子物体;
(4)按“p”键,定位器locator2成为控制器down_crv的子物体;
如图所示:

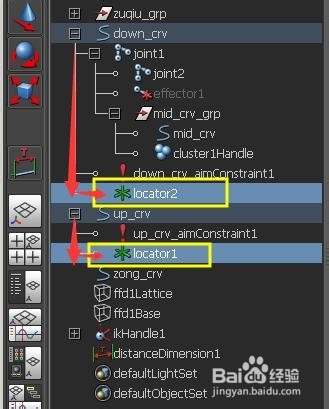
14、14:在“大纲视图”勾选“形状”(在“展示”);
如图所示:

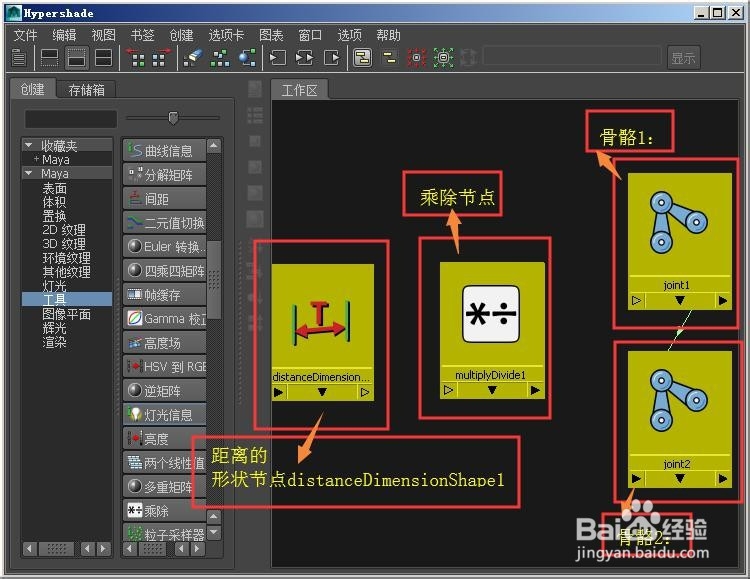
15、15:打开“材质编辑器”,点击“将选定项添加到图表”(在“图表”),将需要节点添加到工作区;
(1)将距离节点distanceDimensionShape1和骨骼joint1,骨骼joint2添加到工作区;
(2)创建一个乘除节点;
如图所示:
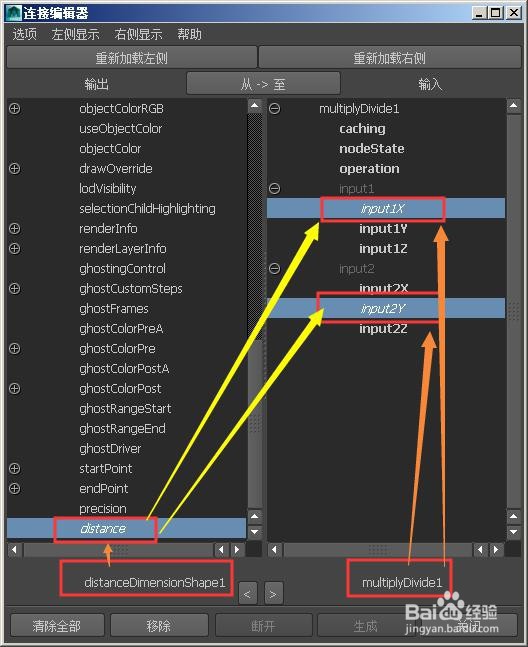
16、16:打开“连接编辑器”;
(1)距离节点distanceDimensionShape1的distance连接乘除节点的input1X;
(2)距离节点distanceDimensionShape1的distance连接乘除节点的input2Y;
如图所示:
17、17:打开“乘除节点”的“属性编辑器”调整数值;
如图所示:

18、18:打开“连接编辑器”;
《1》(1)乘除节点的outputX连接骨骼joint1的scaleX;
(2)乘除节点的outputY连接骨骼joint1的scaleY;
(3)乘除节点的outputY连接骨骼joint1的scaleZ;
《2》(4)乘除节点的outputX连接骨骼joint2的scaleY;
(5)乘除节点的outputY连接骨骼joint2的scaleX;
(6)乘除节点的outputY连接骨骼joint2的scaleZ;
如图所示:


19、19:选晶格ffd1Lattice,按“ctrl+H”键隐藏;
如图所示:

20、20:将晶格和距离节点打组,命名other;
如图所示:

21、21:将控制器和IK按“p”键成为总控制器zong_crv的子物体;
如图所示:

22、22:使用“距离工具”工具(在“创建——测量工具”);
(1)按“V”键,定位器locator3吸附在骨骼joint2;
(2)按“V”键,定位器locator4吸附在骨骼joint1;
(3)将定位器locator3和定位器locator4按“p”键,成为总控制器zong_crv的子物体;
如图所示:


23、23:打开“连接编辑器”;
(1)距离形状节点distanceDimensionShape2的distance连接乘除节点的input1Y;
(2)距离形状节点distanceDimensionShape2的distance连接乘除节点的input2X;
如图所示:

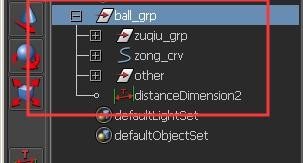
24、24:将整体全部选中,打组,命名为ball_grp;
如图所示:
25、25:现在可以根据需要隐藏不需要的东西,且可以开始做动画了;