如何使用EV3搭建折返机器人?
1、我们分析一下折返机器人的主体结构,整体来看和我们的基础小车有些类似,不同的地方是小车前方有一个颜色传感器。

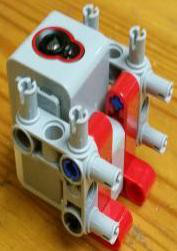
2、颜色传感器的搭建细节图如下图所示,用到了马形插销和方形框架来固定,当然我们也可以使用轴来固定。
3、我们使用万向轮结构用来代替小车后面轮子,搭建细节图如下图所示,搭建好的万向轮结构可以拼接到车体底部。

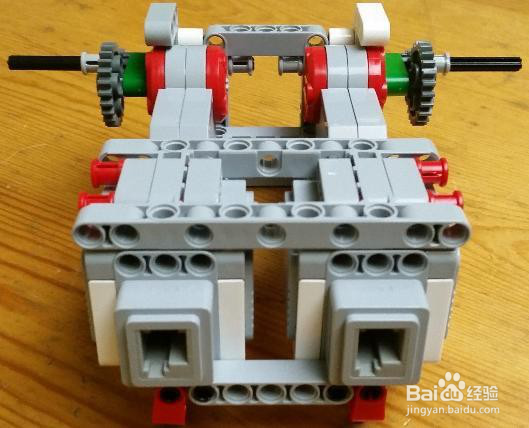
4、两个大型电机安装在两侧,使用长框架和红色长销固定起来,这个搭建的部分难度不高,可以很轻松的完成。
1、设置一条黑线,开始运行后,机器人一直直行,在颜色传感器遇到黑线以后,机器人开始转向往回走。
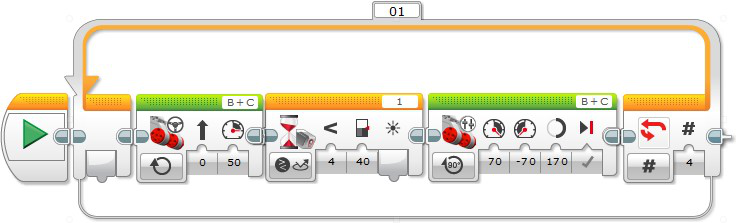
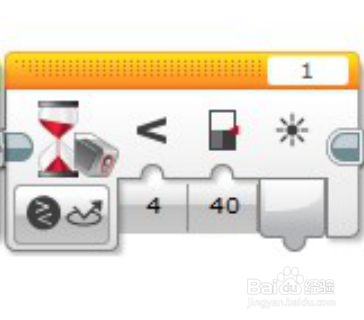
2、保持一定的马达功率直行,等待直到颜色传感器采集到一个比周边地面光值要小的值(默认用黑线),开始执行转向。光值范围需要事先用传感器来测量地面与黑线的光值来确定。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:53
阅读量:46
阅读量:108
阅读量:70
阅读量:195