OpenNI的基础应用
1、上下文对像资源释放:
OpenNI程序某些功能或者整体运行结束后,需要销毁上下文对象,释放资源。
在OpenNI中上下文对象下就提供了这样的自销毁函数Shutdown();
2、更新数据:
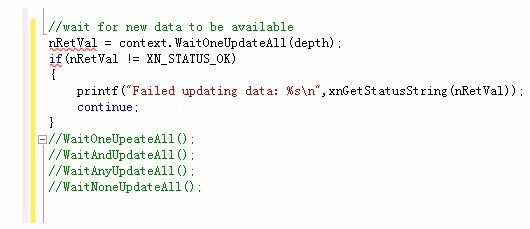
OpenNI的更新机制是在应用程序中的实现方法就是在开发者要获取数据之前,调用update函数,将生产节点预置的数据更新为最新的数据,然后从生产节点获取数据,从而确保获得最新的数据,调用更新这个功能是由上下文对象来控制的,由于一个上下文对象中可能有多个生产节点,所有OpenNI 就提供了4个update函数。
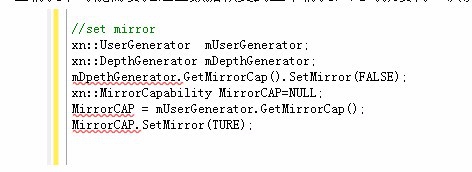
3、镜像设置:
深度传感器(3D sensor)获取到的数据是经过成像的,左右相反;
在一些情况下可能需要把这些数据恢复到正常情况,此时就要再一次镜像操作;
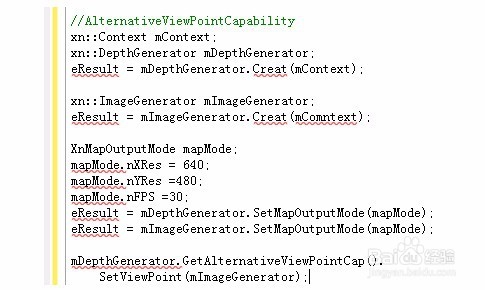
4、图像位置校正:
通常情况下统一把设备当成原点来使用其坐标系,然而实际上,深度摄像头和彩色摄像头的物理位置并不是同一位置,并且这两个摄像头的参数也不相同。
针对这种情况,OpenNI中提供了一个AlternativeViewPointCapability()函数,通过调用这个函数就可以完成彩色图像和深度图像的校准。
5、图生成器:
输出数据模式是一种像素图格式类型的生产节点都称为图生成器。
每一个图生成器都有其特定支持的输出模式。
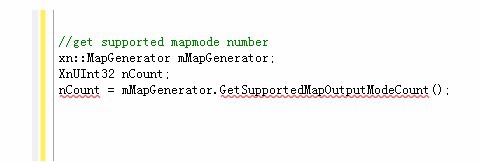
在图生成器模式之下,提供了获取图生成器支持模式数量,以及支持模式的函数,调用图生成器模式下的xnGetSupportedMapOutputModesCounts()函数可以获得该图生成模式的数量。
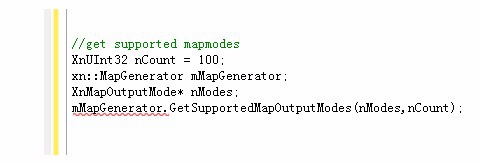
6、调用图生成器下的GetSupportedMapOutputModes()函数则可以获得图生成器所支持的所有的输出模式。
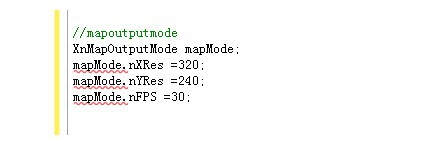
7、图生成器输出模式:
图生成器本质是输出一张像素图。像素图的一些属性则构成了这个图生成器的输出模式。
在OpenNI中给出了图输出模式的三个属性,nXRes(X轴像素),nYRes(Y轴像素),nFPS(帧数)。