如何在Ubuntu 14.04中安装ROS indigo?
1、首先,进入ros官网。将鼠标移至ros官网网页右上角的Getting Started处,选择点击Install。
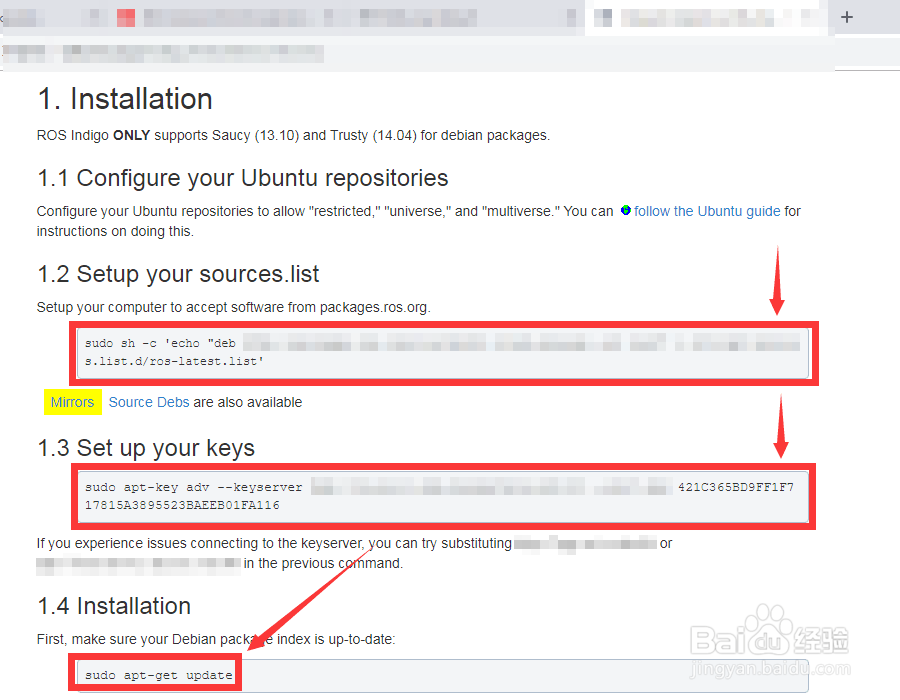
2、浏览器跳转至新的页面,可以看到有4个选项,对应4个不同的机器人操作系统,我们选择第一个Get ROS Indigo Igloo on Ubuntu Linux,点击Install。浏览器跳转至新的页面,下拉至1. Installation。

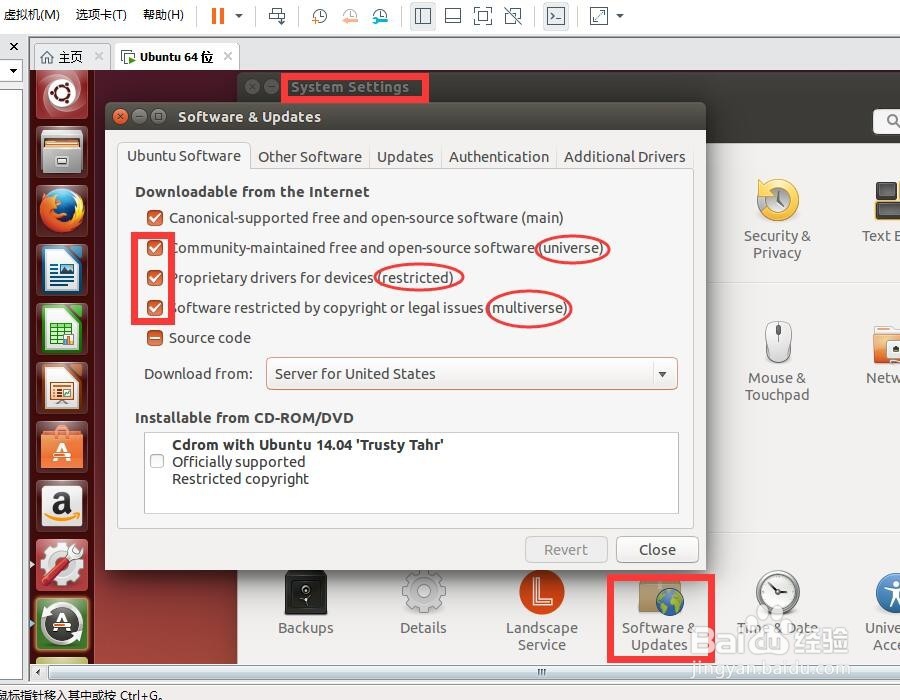
3、打开Ubuntu 14.04,在设置(System Settings)里面选择Software & Updates,确认restricted、universe、multiverse等选项已打勾。
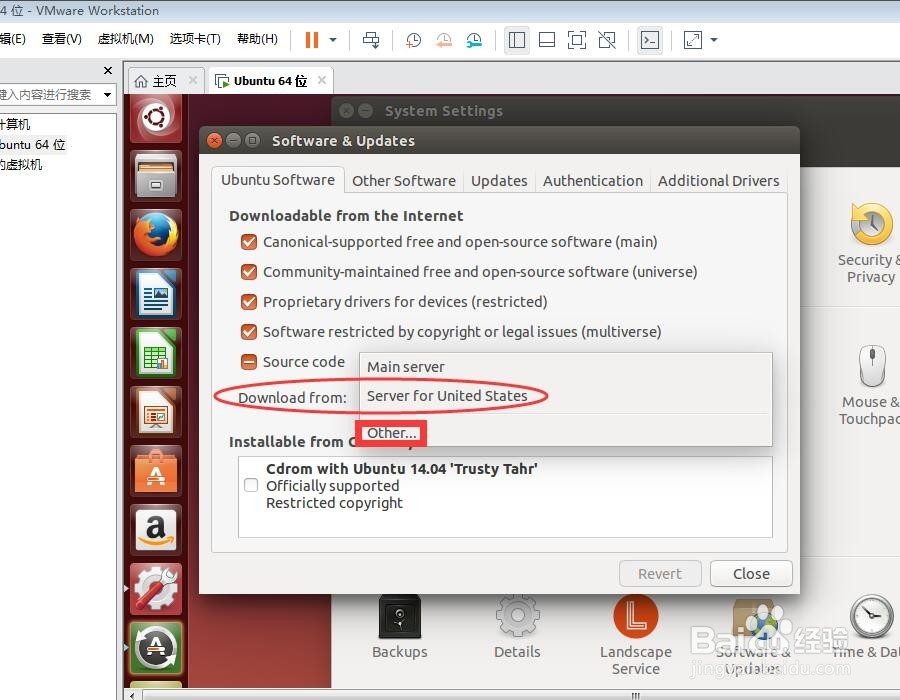
4、默认镜像源为Server for United States,我们在Other中将其修改为中国(China)的,如参考资料2。选择好后,点击Choose Server。
5、点击Close关闭Software & Updates,系统弹出The information about available software is out of date对话框,我们选择Reload等待其重载即可。重载完成后,关闭System Settings。

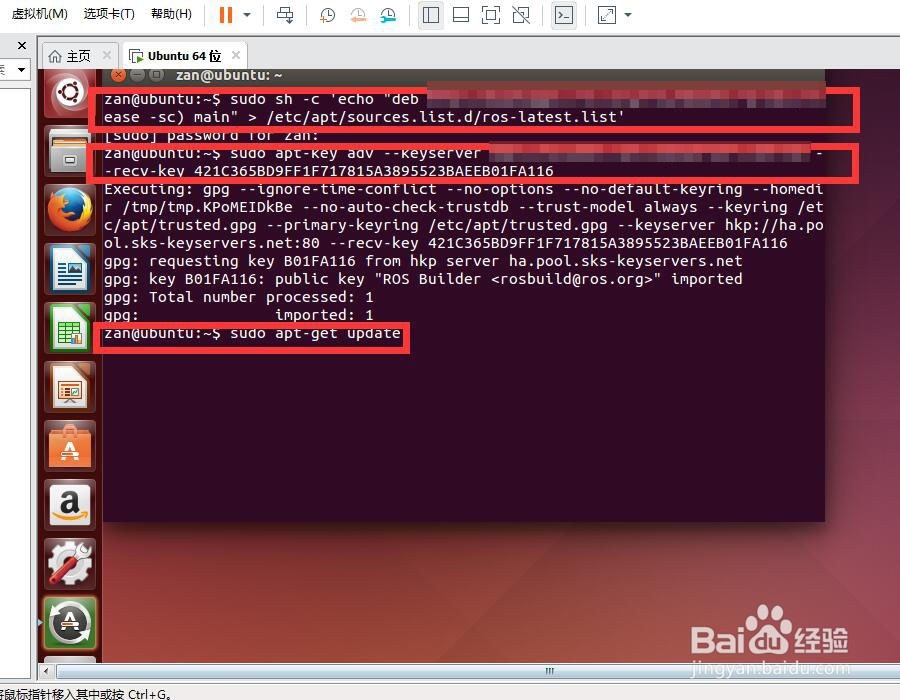
6、用Ctrl+Alt+T调出终端,并依次复制、粘贴和运行前述1. Installation中的3条操作命令。
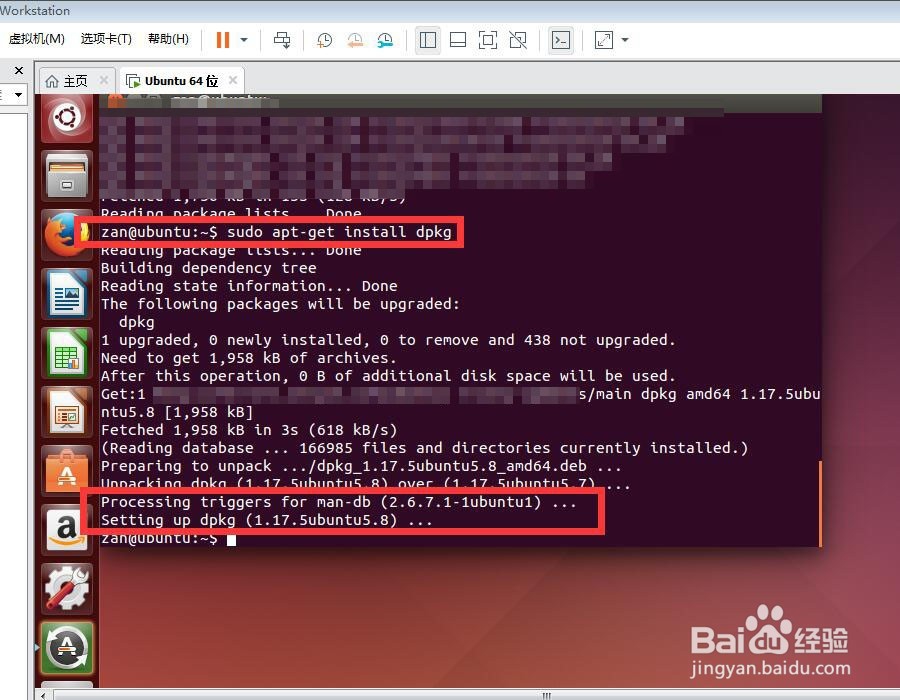
7、输入并运行操作命令sudo apt-get install dpkg,若不执行该命令,后面执行第10步时可能会报错:
Errors were encountered while processing:
/var/cache/apt/archives/python-rosdistro-modules_0.7.0-1_all.deb
/var/cache/apt/archives/python-rosdistro_0.7.0-100_all.deb
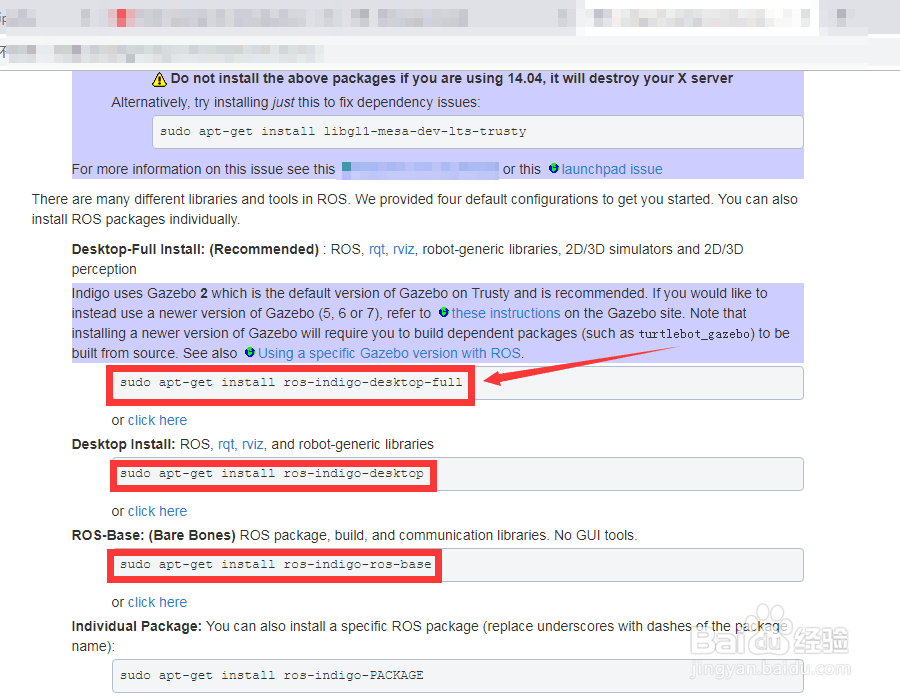
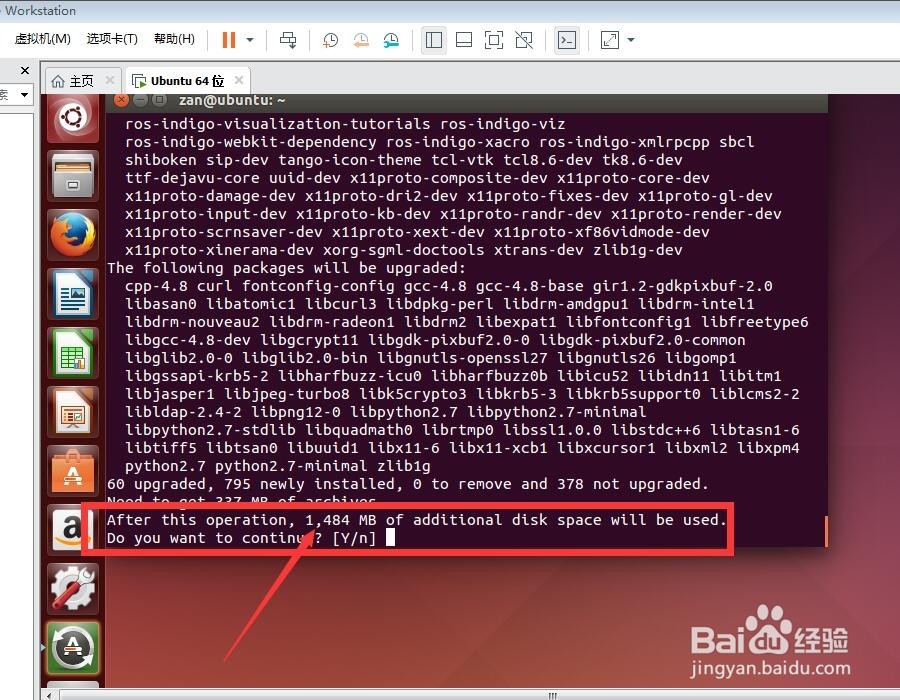
8、复制、粘贴和运行前述网站中的sudo apt-get install ros-indigo-desktop-full,不建议安装ros-indigo-desktop或ros-indigo-ros-base。当系统提示约有1GB多的磁盘空间将会被占用,是否继续时,输入Y并回车即可。此安装过程可能比较漫长,需耐心等待。
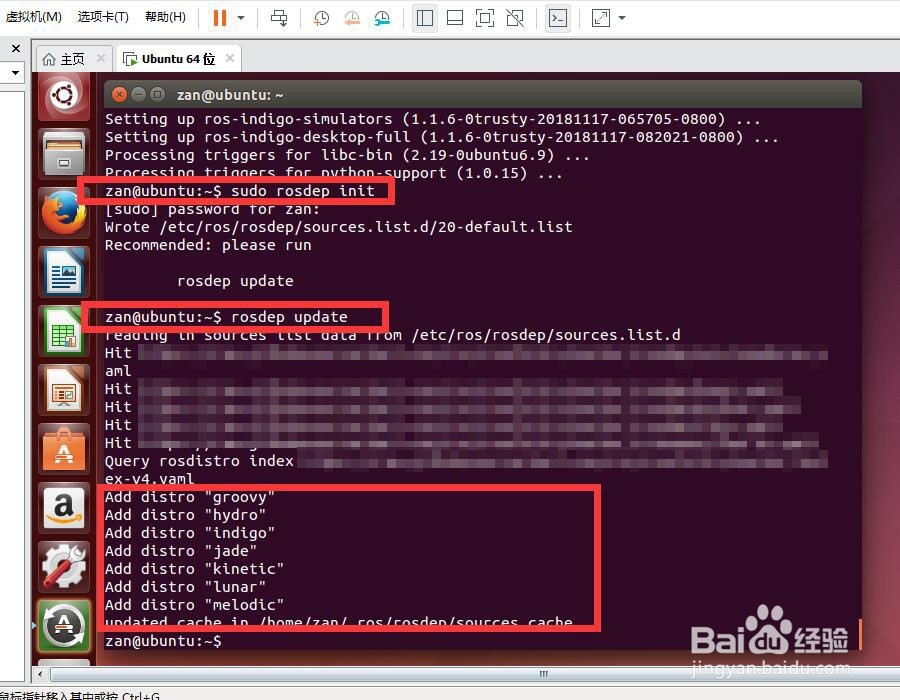
9、接下来,进行初始化。依次复制、粘贴和运行前述网站中1.5 Initialize rosdep小节的2条操作命令:
sudo rosdep init
rosdep update

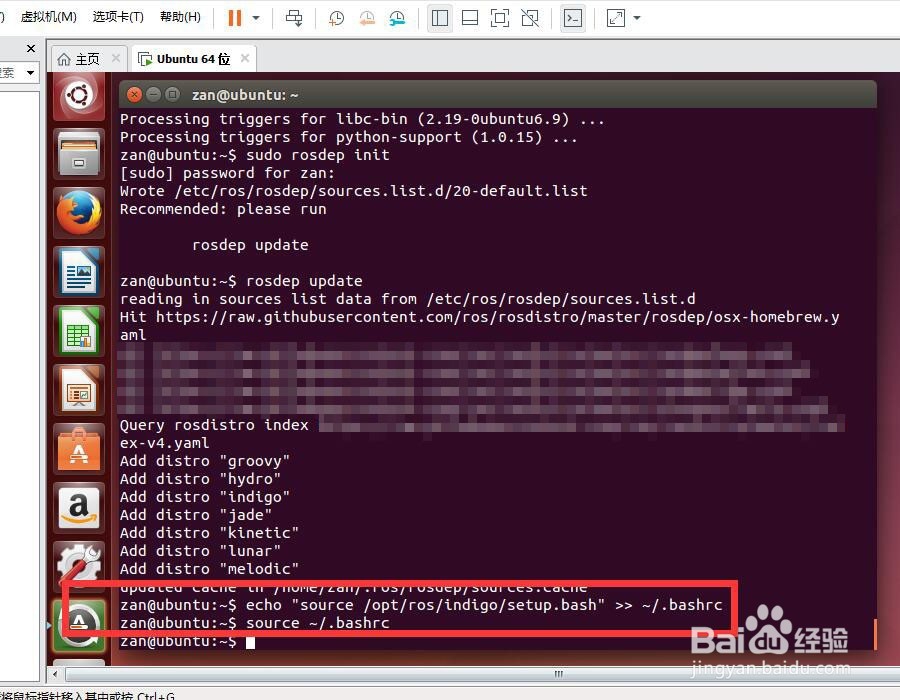
10、然后配置ROS环境,类似于Windows中的环境变量设置。依次复制、粘贴和运行前述网站中1.6 Environment setup小节的2条操作命令:
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc

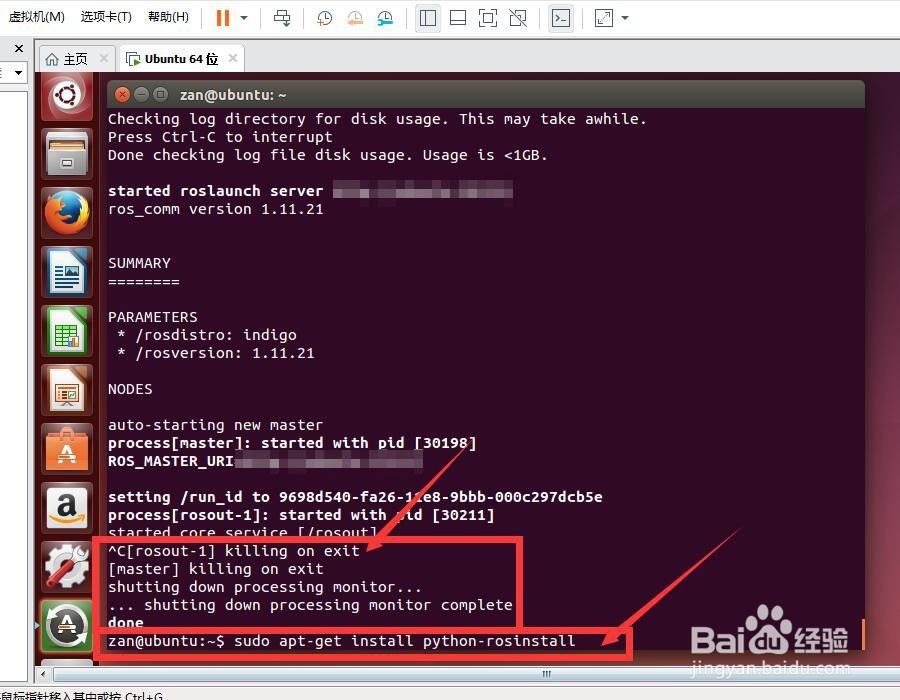
11、至此,ROS indigo已基本安装完成,我们可以输入并运行roscore操作命令,验证ROS indigo是否已经成功安装,得到:
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
NODES
auto-starting new master
process[master]: started with pid [30198]
ROS_MASTER_URI=参考资料3
setting /run_id to 9698d540-fa26-11e8-9bbb-000c297dcb5e
process[rosout-1]: started with pid [30211]
started core service [/rosout]

12、用Ctrl+C退出,然后依次复制、粘贴和运行2条操作命令:
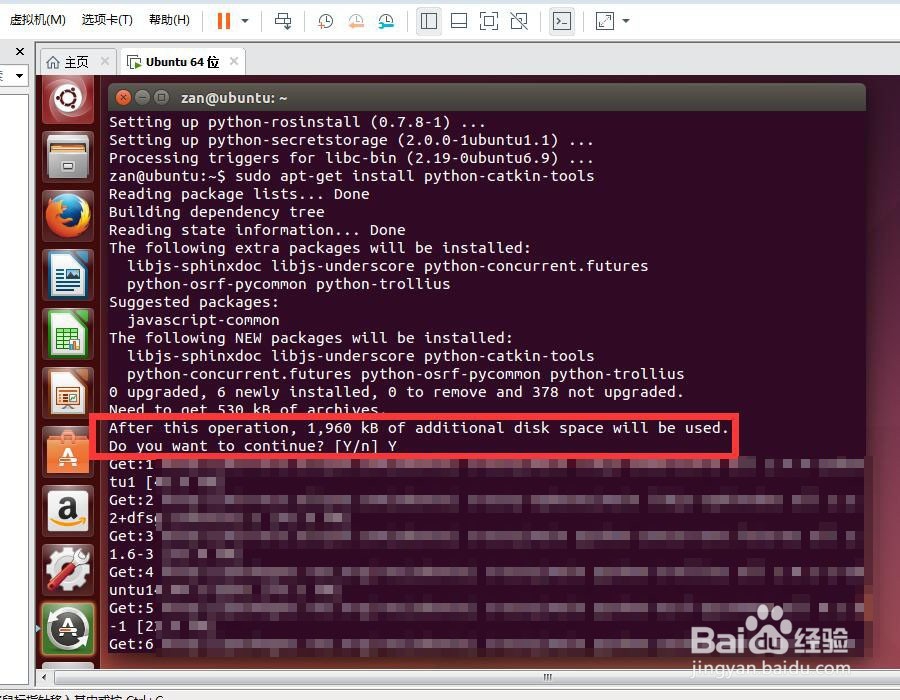
sudo apt-get install python-rosinstall
sudo apt-get install python-catkin-tools
同样地,在此过程中当系统分别提示约有50MB、2000KB的磁盘空间将会被占用,是否继续时,输入Y并回车即可。
13、接下来演示一个实例。百度搜索turtlebot install,选择进入参考资料4网站。复制、粘贴和运行1.2.2 Ubuntu Package Install小节的操作命令:
sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
在此过程中,当系统提示约有310MB的磁盘空间将会被占用,是否继续时,输入Y并回车即可。此安装过程可能比较漫长,需耐心等待。

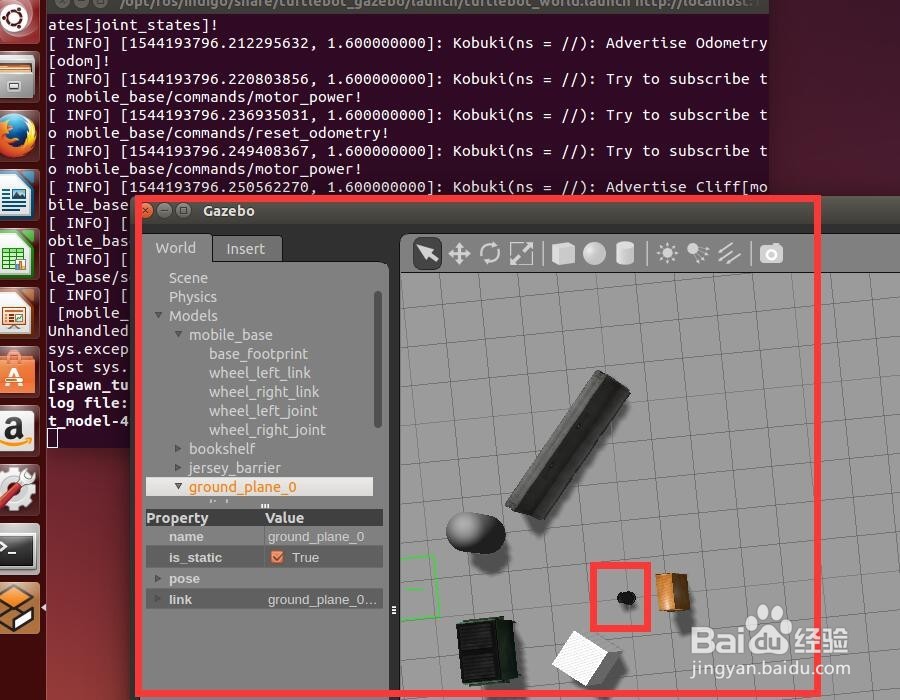
14、安装完成后,输入并运行roslaunch turtlebot_gazebo turtlebot_world.launch操作命令,系统会弹出Gazebo Simulator。第一次运行时,Gazebo Simulator内可能是漆黑一片,需耐心等待其加载完毕。最终可看到图中的Turtlebot机器人。
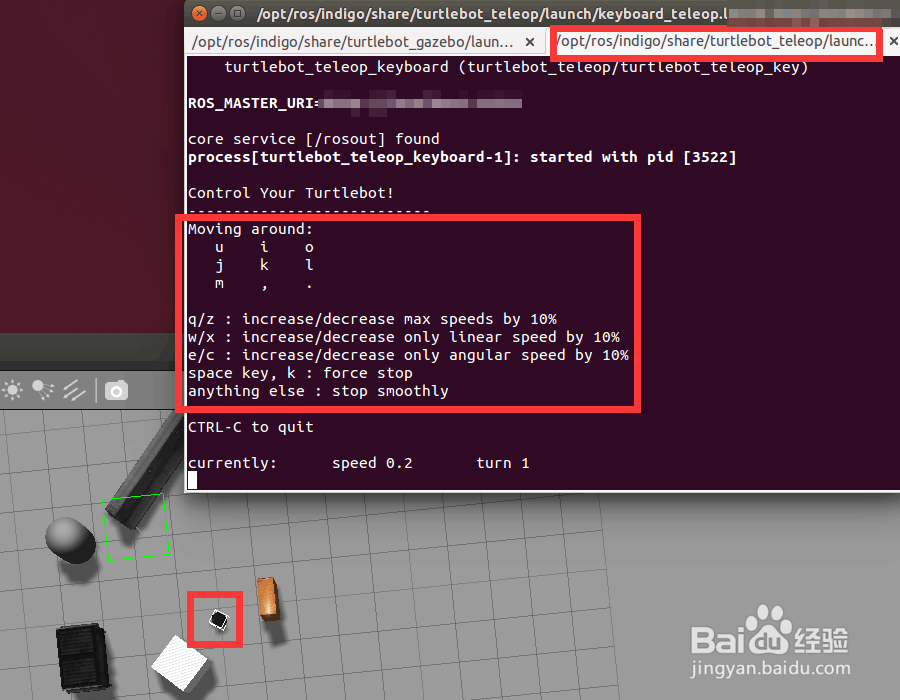
15、我们用Ctrl+Shift+T打开新的终端窗口,输入并运行roslaunch turtlebot_teleop keyboard_teleop.launch操作命令,用键盘控制Turtlebot的运动。