快速入门 | 运动控制器基础轴参数与基础运动控制指令
一、材料准备与控制器接线参考
1、准备材料
(1)电脑一台,安装ZDevelop V3.10及以上版本软件。
(2)控制器一个,本文选用型号为ZMC432。
(3)24V直流电源1个。
(4)驱动器、电机若干。
(5)控制器接线端子若干。
(6)网线若干。
(7)连接线若干。
(8)输入输出设备、扩展模块、人机界面等根据实际需求选择。
2、控制器接线参考

二、常用轴参数的设置


1、BASE——轴选择
语法:BASE(轴1,轴2,轴3,...)
最大可用轴数根据控制器实际硬件决定。
BASE指令用于导向下一个运动指令轴的参数读/写入特定轴或轴组。
每一个过程有其自己的BASE基本轴组,每个程序能单独赋值。ZBasic 程序与控制轴运动的运动发生器分开。
每个轴的运动发生器有其独立的功能,因此每个轴能以自己的速度、加速度等进行编程。轴可以通过叠加运动、同步运动或者通过插补链接在一起,插补运动的速度等参数采用主轴的参数,默认BASE选择的第一个轴为主轴。
例子:
BASE(0,1,2,3) '轴列表选择:0,1,2,3,轴0为主轴
BASE(3,2,5) '轴列表选择:3,2,5,轴3为主轴

2、ATYPE——轴类型
语法:ATYPE=类型值
设置轴的类型,提供轴类型列表,只能设置为当前轴具备的特性。
在程序初始化的时候就设置好ATYPE,ATYPE若不匹配会导致程序无法正常运行。
支持不同类型的轴混合插补。
例子:
BASE(0,1,2) '主轴为轴0
ATYPE=1,1,1 '按轴列表匹配,设为脉冲轴类型
ATYPE AXIS(4)=3 '轴4设为正交编码器类型
ATYPE(3)=65 '轴3设为ECAT周期位置模式65

3、UNITS——脉冲当量
语法:UNITS=脉冲数 UNITS(轴号)=脉冲数
控制器以UNITS作为基本单位,指定每单位发送的脉冲数,支持5位小数精度。
UNITS是用户单位与脉冲单位之间的纽带,UNITS=10000,MOVE(2) 等效给电机20000个脉冲。
若电机不带机械负载,电机转的圈数取决于电机转一圈需要的脉冲数:
例1:电机转一圈需要10000脉冲数,MOVE(3)想让电机转3圈,则UNITS=10000。
例2:电机转一圈需要2^17脉冲数,MOVE(2)想让电机转2圈,则UNITS=2^17。
例3:电机转一圈需要10000脉冲数,该电机连着10mm丝杆,则1000个脉冲表示丝杆前进1mm, 则UNITS=1000,MOVE(5)就表示前进5mm。
设置参考:
假设电机U=3600脉冲转一圈,电机转1°对应的UNITS:UNITS=U/360=3600/360=10,此时MOVE(1),电机转1°。
假设电机U=3600脉冲转一圈,丝杠一圈丝杆走一个螺距,螺距P=2mm,工作台走1mm对应的UNTIS:UNITS=U/P=3600/2=1800,此时MOVE(1),工作台走1mm。
机台存在减速比时,要把减速比算上,假设减速比i=2:1,UNITS=U*i/P=3600*2/2=3600。
4、SPEED——轴速度
轴运动时的速度,单位UNITS/S。
5、ACCEL——加速度
轴每秒达到的速度,越大到达目标速度SPEED的时间越短。
单位UNITS/S^2。
6、DECEL——减速度
轴的减速度原理与ACCEL相同,不设置时减速度自动等于加速度值。 速度、加速度、减速度修改之后立即生效,建议在初始化时设置好。
例子:
RAPIDSTOP(2)
WAIT IDLE(0)
UNITS(0)=1000
SPEED(0)=100
ACCEL(0)=400
DECEL(0)=400
SRAMP(0)=0
DPOS(0)=0
TRIGGER
MOVE(100) AXIS(0)

7、SRAMP——加减速曲线
加减速过程S曲线设置,用于平滑加减速。
语法:SRAMP=平滑时间
平滑时间范围:0-250毫秒,设置后加减速过程会延长相应的时间
1)梯形曲线
SRAMP=0,速度曲线为梯形曲线,速度曲线按梯形曲线变化。保持速度、加减速度等参数值不变。

2)S型曲线
通过设置SRAMP的值来设定合适的加减速变化率,使得速度曲线平滑,在机械启停或加减速时减少抖动。
SRAMP值的范围在0-250毫秒之间,设置后加减速过程会变长相应的时间,时间越长速度曲线越平滑。设置时间若超过250毫秒,按照250毫秒进行平滑。

例子:
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1)
ATYPE=1,1
UNITS=100,100
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
DPOS=0,0
MPOS=0,0
SRAMP(0)=0 '轴0梯形曲线
SRAMP(1)=200 '轴1S形曲线
TRIGGER
MOVE(100) AXIS(0) '轴0运动
MOVE(100) AXIS(1) '轴1运动

8、FASTDEC——急停减速度
急停减速度,单位为UNITS/S^2。
在CANCEL、RAPIDSTOP、达到限位或异常停止时自动采用。当设置为0值或小于DECEL值时自动为DECEL。
例子:
RAPIDSTOP(2)
WAIT IDLE(0)
BASE(0) '选择轴0
DPOS=0
UNITS=100
SPEED=100 '速度
ACCEL=500
DECEL=500 '减速度
FASTDEC=2000 '快减减速度
TRIGGER '自动触发示波器
VMOVE(1) '持续正转
DELAY (1000) '等待1s
CANCEL(2) '快速停止

FASTDEC=2000

FASTDEC=0 急停按照DECEL减速
9、CREEP——爬行速度
轴回零时爬行速度,用于原点搜寻,单位为units/s。使用方法参见下方DATUM单轴找原点指令说明。
10、LSPEED——起始速度
轴起始速度,同时用于停止速度,缺省0,单位为units/s。
当多轴运动时,作为插补运动的起始速度。
当需要追求效率时,可以考虑设置起始速度。
例子:
BASE(0,1) '选择轴0为主轴
DPOS=0,0
UNITS=100,100 '脉冲当量100
SPEED=100,100 '主轴速度
ACCEL=1000,1000
DECEL=1000,1000
LSPEED(0)=40 '起始速度
TRIGGER '自动触发示波器
MOVE(100,80) '各轴运动距离

11、AXIS——临时轴选择
语法:AXIS(轴号)
AXIS临时修改一个运动指令或轴参数到一个指定轴上去执行,很多指令后方都可以加AXIS参数,在命令行或程序行特别有效。
例子:
PRINT MPOS AXIS(3) '打印轴3的MPOS,等效于PRINT MPOS(3)
PRINT MPOS(4) '打印轴4的MPOS
MOVE(300) AXIS(2) '轴2运动100
REP_DIST AXIS(1)= 100 '设置轴1的坐标循环位置
12、DPOS——轴指令位置
轴的虚拟坐标位置,或称需求位置,单位是UNITS。
此参数常用于监控运动指令的运行情况,写DPOS会自动转换为OFFPOS偏移,仅修改坐标,不会移动电机。
例子:
BASE(0,1)
DPOS=0,100
MOVE(100,0) '第一段
MOVE(-100,-100) '第二段
MOVE(100,0) '第三段,终点(100,0)

运动轨迹
13、MPOS——编码器反馈位置
轴的测量反馈位置,单位是UNITS。
此参数常用于监控编码器的反馈位置,写MPOS会自动转换为OFFPOS偏移,仅修改坐标。
不连接编码器时MPOS=DPOS。

14、MERGE——开启连续插补
语法:MERGE = ON/OFF或1/0
开启连续插补功能,将运动缓冲区前后缓冲的运动连接到一起,使连续的多段插补运动之间不减速,用以提高加工效率。
若不开启连续插补,上一条插补运动完成后,会先减速停止到速度为0,再重新加速执行下一条插补运动。
例子:
BASE(0) '选择轴0
DPOS=0
UNITS=100
SPEED=100
ACCEL=500
DECEL=500
MERGE=ON '打开连续插补
TRIGGER '自动触发示波器
MOVE(100) '第一段运动
MOVE(100) '第二段运动

MERGE=ON

MERGE=OFF
当MERGE设置为ON时,多段插补间仍减速,可能原因如下:
1)可能MERGE并没有设置成功,可以打印查看或在轴参数窗口查看。
2)控制器是点位运动型号,运动功能简单,不支持连续插补。
3)设置了CORNER_MODE拐角减速,打印确认。
4)使用了带SP的运动指令,并设置了ENDMOVE_SPEED,STARTMOVE_SPEED,此时速度由这两条指令确定。
5)多条插补间切换了主轴,主轴速度参数改变。
6)多条插补间加入了MOVE_DELAY运动缓冲中延时指令,即使延时写0,也会导致减速。
三、常用轴参数的输入口设置

1、INVERT_IN——反转输入
反转输入状态,可以读取判断是否有反转。
语法:INVERT_IN(输入通道, ON/OFF) ON-反转,OFF不反转
ZMC控制器输入OFF时,认为有信号输入,要相反效果可以用INVERT_IN反转电平。
ECI系列控制器入ON时,认为有信号输入,要相反效果可以用INVERT_IN反转电平。
例子:
BASE(0,1,2,3) '选择轴0,1,2,3
FWD_IN=6,7,8,9 '分别设置正向限位开关
INVERT_IN(6,ON) '反转信号
INVERT_IN(7,ON)
输入口6、7设置信号反转,给输入口6、8输入信号,输入口状态如图所示。

2、映射正/负限位输入
FWD_IN——映射正限位输入
REV_IN——映射负限位输入
分别设置正向/负向硬件限位开关对应的输入点编号,-1无效。
硬限位开关是物理开关元件,由指令映射到相应输入开关信号上。控制器限位信号生效后,会立即停止轴,停止减速度为FASTDEC。


例子:
BASE(0,1,2,3) '选择轴0,1,2,3
FWD_IN=6,7,8,9 '分别设置正向限位开关
INVERT_IN(6,ON) '反转信号
INVERT_IN(7,ON)
INVERT_IN(8,ON)
INVERT_IN(9,ON)
软件限位用于限制轴的DPOS位置范围,用于软件的安全限位。
FS_LIMIT——正向软限位设置
FS_LIMIT(0)=200 '设置轴0正向软限位200units
RS_LIMIT——负向软限位设置
RS_LIMIT(0)=-300 '设置轴0负向软限位-300units
3、DATUM_IN——映射原点输入
通用输入口设置为原点开关信号,-1无效。
在轴回零过程中此信号输入才生效。
4、ALM_IN——映射报警输入
驱动器告警对应的输入口编号,-1无效。
控制器报警信号生效后,会立即停止轴,停止减速度为FASTDEC。
例子:
BASE(0,1)
DATUM_IN =6 ,7 '将轴0、1原点输入分别定义到输入口6、7
INVERT_IN(6,ON) '把原点信号反转
INVERT_IN(7,ON)
ALM_IN = 10,11 '将轴0、1告警信号分别定义到输入口10、11
INVERT_IN(10,ON) '信号反转
INVERT_IN(11,ON)

5、FHOLD_IN——映射保持输入
保持输入对应的输入点编号,-1无效。 如果有输入信号,运动轴的速度由程序速度变为FHSPEED参数速度;当取消输入,运动过程中的运动速度返回程序速度。
6、FHSPEED——保持速度
轴保持速度,在FHOLD_IN被按下保持时的速度,单位为units/s。 对应的输入处于保持状态时才能一直以此速度运动。
例子:
RAPIDSTOP(2)
WAIT IDLE(0)
BASE(0) '选择轴
0DPOS=0 '坐标清0
UNITS=100
ATYPE=1
ACCEL=500 '加速度
DECEL=500
SPEED=100 '速度
FHSPEED=50 '保持速度
FHOLD_IN(0)=0 '轴0的保持输入设为IN0口
INVERT_IN(0,ON) '反转电平
TRIGGER '自动触发示波器
MOVE(10000) '运动

7、映射正/负JOG输入
FWD_JOG——映射正向JOG输入;
REV_JOG——映射负向JOG输入。
正向/负向JOG输入对应的输入口编号,-1无效。
当有正向JOG信号输入时,对应轴按照JOGSPEED速度正向运动。
当有正向JOG信号输入时,对应轴按照JOGSPEED速度负向运动。
正负信号同时有效时,正向运动。
JOGSPEED——JOG速度。
JOG时的速度,单位为units/s。
当REV_JOG/FWD_JOG被设置,对应输入点按下时,并保持当前输入状态,电机将以JOGSPEED慢速运动,输入点松开运动停止。
例子:
BASE(0) '选择轴0
ATYPE=1 '脉冲轴类型
DPOS=0 '坐标清0
UNITS=100 '脉冲当量
SPEED =100 '主轴速度
ACCEL=1000 '加速度
DECEL=1000 '减速度
TRIGGER '自动触发示波器
JOGSPEED=50 'JOG速度50
FWD_JOG=0 'IN0作为正向JOG开关
REV_JOG=1 'IN1作为负向JOG开关
INVERT_IN(0,ON) '反转信号
INVERT_IN(1,ON)
运行效果:
输入0口有信号输入时,轴0正向运行,速度为50。
输入1口有信号输入时,轴0负向运行,速度为50。
输入0、1同时有信号输入时,轴0正向运行。

8、FAST_JOG——映射点动输入
快速点动的输入的编号,-1为无效。
如果设置快速点动输入,速度由SPEED参数给出。如果没有输入设置,速度由JOGSPEED参数给出。
FAST_JOG需要配合FWD_JOG(映射正向JOG输入)或(REV_JOG映射负向JOG输入)一起使用才能控制轴运行速度。
例子:
BASE(0) '选择轴0
DPOS=0 '坐标清0
UNITS=100
ATYPE=1
SPEED=100 '设置速度为100 units/s
ACCEL=500 '加速度为500units/s/s
JOGSPEED=200 '点动速度设为200units/s
FAST_JOG(0)=0 '轴0的快速输入设为IN0口
FWD_JOG(0)=1 '正向点动开关设为IN1口
INVERT_IN(0,ON) '反转电平
INVERT_IN(1,ON)
TRIGGER '自动触发示波器

IN0无输入时,按下IN1并保持,轴速度为JOGSPEED=200

IN0有输入时,按下IN1并保持,轴速度为SPEED=100
四、常用轴运动的运动状态

轴的运行状态可以通过轴参数窗口监控,或者读取对应指令的返回值判断轴状态。
1、MTYPE——当前运动类型
读取当前正在进行的运动指令类型。只读参数,获取指令返回值查表得出当前轴的运动类型。
语法:VAR1 = MTYPE
当插补联动时,对从轴总是返回主轴的运动指令类型。
2、NTYPE——下一条运动类型
读取当前正在进行的运动指令后面的第一条指令类型。只读参数,获取指令返回值后查表。
语法:VAR1 = MTYPE
当插补联动时,对从轴总是返回主轴的运动指令类型。

3、IDLE——当前运动状态
IDLE指令用于判断加在轴上的运动指令是否完成,运动中返回0,运动结束返回-1。
只读参数,程序中一般使用WAIT IDLE(轴号)语句判断轴状态。
当轴关联为机械手,CONNFRAME逆解时,关节轴一直返回0;CONNREFRAME正解时,虚拟轴一直返回0。
例子:
RAPIDSTOP(2)
WAIT IDLE
BASE(0,1,2)
ATYPE=1,1,1
UNITS=100,100,100
SPEED=100,100,100
ACCEL=1000,1000,1000
DECEL=1000,1000,1000
DPOS = 0,0,0
OP(0,OFF)
TRIGGER
MOVE(100,100) '轴0和轴1直线插补
MOVE(200) AXIS(2) '轴2运动
WAIT UNTIL IDLE(0) AND IDLE(1) AND IDLE (2)
'等待轴0,1,2都停止
OP(0,ON)

4、MSPEED——实际反馈速度
轴的测量反馈位置速度,单位是UNITS/S,只读参数。
插补运动时,读取的是各个轴的分速度。
5、VP_SPEED——当前运动速度
回轴当前运动的速度,单位为UNITS/S,只读参数。
当多轴运动时,主轴返回的是插补运动的速度,不是主轴的分速度。非主轴返回的是相应的分速度,与MSPEED效果一致。
VP_SPEED在默认情况下是为显示多轴合成速度设计的,是没有负值的,除非把SYSTEM_ZSET指令的bit0的值设置为0,就可以用来显示单轴的命令速度,可正可负。
例子:
BASE(0,1)
ATYPE=1 ,1
DPOS=0 ,0 '坐标清0
UNITS=100,100 '脉冲当量
SPEED =100,100 '主轴速度
ACCEL=1000,1000 '加速度
DECEL=1000,1000 '减速度
TRIGGER '自动触发示波器
MOVE(100,100) '两轴各运动100
运行效果:
插补运动轴0为主轴,VP_SPEED(0)返回插补运动合成速度。

6、AXISSTATUS——轴状态
查看轴的各种状态,按十进制显示数值,按二进制对应位判断状态,可同时发生多个错误。 轴参数窗口显示的是八进制,使用PRINT指令打印的值为十进制。
例子:
?AXISSTATUS(1) '查看轴1的状态,打印结果:576,表示找原点时超过正向软限位,轴参数窗口显示值:240h
7、AXIS_STOPREASON——轴停止原因
轴历史停止原因锁存,写0清除,自动按位锁存,锁存的是AXISSTATUS的信息。

五、常用运动控制指令

1、VMOVE——持续运动
语法:VMOVE(运动方向) [AXIS(轴号)]
运动方向:-1负向运动,1正向运动
VMOVE执行后,除非使用CANCEL或RAPIDSTOP清除运动缓存,否则会一直运转。
当前面的VMOVE运动没有停止时,后方的VMOVE指令会自动替换前面的VMOVE指令并修改方向,因此无需CANCEL前面的VMOVE指令。
例子:
BASE(0) '选择轴0
ATYPE=1 '脉冲轴类型
DPOS=0 '坐标清0
UNITS=100 '脉冲当量
SPEED =100 '主轴速度
ACCEL=1000 '加速度
DECEL=1000 '减速度
TRIGGER '自动触发示波器
VMOVE(1) AXIS(0) '轴0以SPPED速度正向运动,等效FORWARD指令
VMOVE(-1) AXIS(0) '轴0以SPPED速度负向运动,等效REVERSE指令
DELAY(1000)
CANCEL(2) AXIS(0) '取消AXIS(0)的当前运动。
WAIT IDLE(0) '等待轴0运动停止

2、FORWARD——持续正向运动
语法:FORWARD [AXIS(轴号)]
让轴一直以SPPED的速度正向运动,必须CANCEL后才能切换REVERSE。
3、REVERSE——持续负向运动
语法:FORWARD [AXIS(轴号)]
让轴一直以SPPED的速度负向运动,必须CANCEL后才能切换FORWARD。
例子:
BASE(0) '选择轴0
ATYPE=1 '脉冲轴类型
DPOS=0 '坐标清0
UNITS=100 '脉冲当量
SPEED =100 '主轴速度
ACCEL=1000 '加速度
DECEL=1000 '减速度
TRIGGER '自动触发示波器
FS_LIMIT=200 '设置正向软限位200units
FORWARD AXIS(0) '让轴0一直以SPPED的速度正向运动

FS_LIMIT=200 '正向软限位200
FORWARD AXIS(0) '正向运动

RS_LIMIT=-300 '负向软限位-300
REVERSE AXIS(0) '负向运动
4、DATUM——单轴找原点
语法:DATUM (模式值)
单轴找原点运动,多个轴回零需要多次调用此指令,提供多种模式供选择。
下图模式值加10表示碰到限位后反找, 不会碰到限位停止,例如13=模式3+限位反找10,用于原点在正中间的情况。
下图模式值加100(模式100+n和110+n分别对应n和10+n),ATYPE=4或65,表示接入编码器后可以自动清零MPOS(仅限4系列),其他模式只能手动清零MPOS。

Z信号回零必须配置为带Z信号ATYPE(ATYPE=4或者7)。
除了采用控制器提供的回零方式,EtherCAT或RTEX伺服还可以采用驱动器回零, 此时原点和限位信号接在驱动器上
驱动器回零语法:DATUM(21,模式值)
驱动器回零模式值查看对应驱动器手册。
单轴找原点时,原点开关通过DATUM_IN设置,正负限位开关分别通过FWD_IN和REV_IN设置。
控制器正/负限位信号生效后,会立即停止轴,停止减速度为FASTDEC。回零的加10模式除外。
输入口映射方法:
BASE(0,1)
DATUM_IN =6,7 '将轴0,1原点输入对应到输入口6,7
INVERT_IN(6,ON) '把原点信号反转
INVERT_IN(7,ON) '把原点信号反转
FWD_IN=2,3 '将轴0,1正向限位开关输入对应到输入口2,3
INVERT_IN(2,ON) '把正向限位信号反转
INVERT_IN(3,ON) '把正向限位信号反转
REV_IN=4,5 '将轴0,1负向限位开关输入对应到输入口4,5
INVERT_IN(4,ON) '把负向限位信号反转
INVERT_IN(5,ON) '把负向限位信号反转
ZMC控制器输入OFF有效,表示到达原点/限位,常开类型信号需要采用INVERT_IN反转电平。ECI控制器与之相反,输入ON有效。

例子:
BASE(0)
DPOS=0
ATYPE=1
SPEED = 100 '找原点速度
CREEP = 10 '找到原点后反向爬行速度
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100 '加减速平滑
DATUM_IN=5 '输入IN5作为原点开关
INVERT_IN(5,ON) '反转IN5电平信号,常开信号进行反转(ZMC控制器)
TRIGGER '自动触发示波器
DATUM(3)

模式3:轴以SPEED速度正向运行,直到碰到原点开关,然后以CREEP速度反向运动,直到再次回到原点开关的位置停下,此时回零完成,轴的DPOS自动置0,若中途碰到限位开关,轴立即停止。
例子:
BASE(0)
DPOS=0
ATYPE=4
SPEED = 100 '找原点速度
CREEP = 10 '找到原点后反向爬行速度
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100 '加减速平滑
DATUM_IN=5 '输入IN5作为原点开关
INVERT_IN(5,ON) '反转IN5电平信号,常开信号进行反转(ZMC控制器)
TRIGGER '自动触发示波器
DATUM(103)

模式103:接入真实编码器,轴以SPEED速度正向运行,直到碰到原点开关,然后以CREEP速度反向运动,直到再次回到原点开关的位置停下,此时回零完成,轴的DPOS和MPOS自动置0,若中途碰到限位开关,轴立即停止。
5、CANCEL & RAPIDSTOP——轴停止
语法:CANCEL(模式)/RAPIDSTOP (模式)
CANCEL和RAPIDSTOP 均有四种模式,二者的区别是CANCEL为单轴/轴组停止指令,RAPIDSTOP为停止所有轴。
模式1:CANCEL=CANCEL(0) 取消当前运动,继续取缓冲区指令指令
模式2:CANCEL(1) 取消缓冲区的运动,当前运动仍然要执行完
模式3:CANCEL(2) 取消当前运动和缓冲区的运动,轴立即停止
模式4:CANCEL(3) 立即中断脉冲的发送
模式2减速度按FASTDEC快减速和DECEL减速度中最大的值,使用指令之后要调用绝对位置运动,必须先WAIT IDLE 等待停止完成。
加上轴号停止目标轴CANCEL AXIS(1),当想要让电机快速停止时,建议使用RAPIDSTOP(2) 或CANCEL(2)。
使用CANCEL指令停止插补运动中的主轴或者BASE轴列表中的任意一个轴,都会停止轴组的插补运动。
例子:
BASE(0)
DPOS=0
SRAMP=0
ATYPE=1
UNITS=100
SPEED=500
ACCEL=1000
DECEL=1000 '减速度
FASTDEC=10000 '快减速
TRIGGER
MOVE(1000) '当前运动
MOVE(-1000) '缓冲运动
'DELAY(1000) '延时
CANCEL(0)
以CANCEL指令为例,四种模式执行效果如下图。

CANCEL(0)取消当前运动

CANCEL(1)取消缓冲运动

CANCEL(2)取消当前&缓冲运动

CANCEL(3)中断脉冲发送
6、MOVE——直线插补
语法:MOVE(distance1 [,distance2 [,distance3 [,distance4...]]])
单轴直线运动或多轴直线插补运动,相对运动距离。绝对直线插补用MOVEABS指令。
插补是一个实时进行的数据密化的过程,根据给定的信息进行数字计算,不断计算出参与运动的各个坐标轴的进给量,分别驱动各自相应的执行部件产生协调运动,以使被控机械部件按理想的路线与速度移动。
插补运动时只有主轴速度参数有效,主轴是BASE的第一个轴,运动参照这个轴的参数,插补运动指令进入主轴的运动缓冲区。
支持不同类型的轴混合插补。
插补运动距离:

插补运动速度:主轴速度V0为设置的SPEED,各分轴速度Vn=V0×Xn/X
例子:
BASE(0,1)
ATYPE=1,1
UNITS=100,100
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100
DPOS=0,0
MPOS=0,0
TRIGGER
MOVE(150,200)

插补运动主轴为轴0,DPOS(0)、DPOS(1)各轴运动距离,MSPEED(0)、MSPEED(1)分轴速度,VP_SPEED(0)主轴的合成速度。

XY模式显示两轴插补合成轨迹
7、MOVECIRC——起点终点圆心三点圆弧插补
语法:MOVECIRC(end1,end2,centre1,centre2,direction)
(end1,end2)终点坐标;(centre1,centre2)圆心坐标;direction方向:0-逆时针,1-顺时针。
两轴圆弧插补,起点、终点、圆心三点画弧,起点使用轴当前坐标,相对运动。绝对圆弧插补使用MOVECIRCABS指令。
当起点坐标与终点坐标相同时,画出整圆。
例子:
BASE(0,1)
ATYPE=1,1 '设为脉冲轴类型
UNITS=100,100
DPOS=0,0
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
TRIGGER '自动触发示波器
MOVECIRC(200,0,100,0,1) '半径100顺时针画半圆
'MOVECIRC(0,0,100,0,0) '半径100逆时针画整圆

MOVECIRC(200,0,100,0,1)'半径100顺时针画半圆
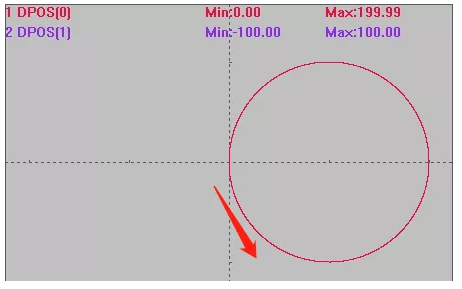
MOVECIRC(0,0,100,0,0)'半径100逆时针画整圆
8、MOVECIRC2——起点中间点终点三点圆弧插补
语法:MOVECIRC2(mid1,mid2,end1,end2)
(mid1,mid2)中间点坐标;(end1,end2)终点坐标
与上面的指令不同之处在于本指令采用起点、中间点、终点三点画弧,起点使用轴当前坐标,相对运动。绝对圆弧插补使用MOVECIRC2ABS指令。 此指令不能进行整圆插补运动,整圆使用MOVECIRC相对圆弧,或连续使用两条此类指令。
例子:
BASE(0,1)
ATYPE=1,1 '设为脉冲轴类型
UNITS=100,100
DPOS=0,0
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
TRIGGER '自动触发示波器
MOVECIRC2(100,100,200,0) '半径100顺时针画半圆
'MOVECIRC2(100,-100,200,0) '半径100逆时针画半圆

MOVECIRC2(100,100,200,0)'半径100顺时针画半圆

MOVECIRC2(100,-100,200,0)'半径100逆时针画半圆